使用GPU和Theano加速深度学习
【编者按】 GPU因其浮点计算和矩阵运算能力有助于加速深度学习是业界的共识,Theano是主流的深度学习Python库之一,亦支持GPU,然而Theano入门较难,Domino的这篇博文介绍了如何使用GPU和Theano加速深度学习,使用更简单的基于Theano的 Nolearn 库。教程由多层感知器及卷积神经网络,由浅入深,是不错的入门资料。
基于Python的深度学习
实现神经网络算法的Python库中,最受欢迎的当属Theano。然而,Theano并不是严格意义上的神经网络库,而是一个Python库,它可以实现各种各样的数学抽象。正因为如此,Theano有着陡峭的学习曲线,所以我将介绍基于Theano构建的有更平缓的学习曲线的两个神经网络库。
第一个库是 Lasagne 。该库提供了一个很好的抽象,它允许你构建神经网络的每一层,然后堆叠在彼此的顶部来构建一个完整的模型。尽管这比Theano显得更好,但是构建每一层,然后附加在彼此顶部会显得有些冗长乏味,所以我们将使用 Nolearn 库,它在Lasagne库上提供了一个类似 Scikit-Learn 风格的API,能够轻松地构建多层神经网络。
延伸阅读 : 从Theano到Lasagne:基于Python的深度学习的框架和库
由于这些库默认使用的不是Domino硬件,所以你需要创建一个requirements.txt文件,该文件内容如下:
-e git://github.com/Theano/Theano.git#egg=Theano -e git://github.com/lasagne/lasagne.git#egg=lasagne nolearn==0.5.0
配置Theano
现在,在我们导入Lasagne库和Nolearn库之前,首先我们需要配置Theano,使其可以使用GPU硬件。要做到这一点,我们需要在我们的工程目录中新建一个.theanorc文件,该文件内容如下:
[global] device = gpu floatX = float32 [nvcc] fastmath = True
这个.theanorc文件必须放置在主目录中。在你的本地计算机上,这个操作可以手工完成,但我们不能直接访问Domino机器的主目录,所以我们需要使用下面的代码将文件移到它的主目录中:
import os import shutil destfile = "/home/ubuntu/.theanorc" open(destfile, 'a').close() shutil.copyfile(".theanorc", destfile) 上面的代码会在主目录创建了一个空的.theanorc文件,然后复制我们项目目录下的.theanorc文件内容到该文件中。
将硬件切换到GPU后,我们可以来做一下测试,使用Theano文档中提供的测试代码来看看Theano是否能够检测到GPU。
from theano import function, config, shared, sandbox import theano.tensor as T import numpy import time vlen = 10 * 30 * 768 # 10 x #cores x # threads per core iters = 1000 rng = numpy.random.RandomState(22) x = shared(numpy.asarray(rng.rand(vlen), config.floatX)) f = function([], T.exp(x)) print f.maker.fgraph.toposort() t0 = time.time() for i in xrange(iters): r = f() t1 = time.time() print 'Looping %d times took' % iters, t1 - t0, 'seconds' print 'Result is', r if numpy.any([isinstance(x.op, T.Elemwise) for x in f.maker.fgraph.toposort()]): print 'Used the cpu' else: print 'Used the gpu'
如果Theano检测到GPU,上面的函数运行时间应该需要0.7秒,并且输出“Used the gpu”。否则,整个过程将需要2.6秒的运行时间,同时输出“Used the cpu”'。如果输出的是后一个,那么你肯定是忘记将硬件切换到GPU了。
数据集
对于这个项目,我们将使用CIFAR-10图像数据集,它来自10个不同的类别,包含了60000个32x32大小的彩色图像。

幸运的是,这些数据属于 pickled 格式,所以我们可以使用辅助函数来加载数据,将每个文件加载到NumPy数组中并返回训练集(Xtr),训练集标签(Ytr),测试集(Xte)以及测试集标签(Yte)。下列代码归功于 Stanford's CS231n 课程的工作人员。
import cPickle as pickle import numpy as np import os def load_CIFAR_file(filename): '''Load a single file of CIFAR''' with open(filename, 'rb') as f: datadict= pickle.load(f) X = datadict['data'] Y = datadict['labels'] X = X.reshape(10000, 3, 32, 32).transpose(0,2,3,1).astype('float32') Y = np.array(Y).astype('int32') return X, Y def load_CIFAR10(directory): '''Load all of CIFAR''' xs = [] ys = [] for k in range(1,6): f = os.path.join(directory, "data_batch_%d" % k) X, Y = load_CIFAR_file(f) xs.append(X) ys.append(Y) Xtr = np.concatenate(xs) Ytr = np.concatenate(ys) Xte, Yte = load_CIFAR_file(os.path.join(directory, 'test_batch')) return Xtr, Ytr, Xte, Yte 多层感知器
多层感知器是一种最简单的神经网络模型。该模型包括一个输入层数据,一个施加一些数学变换的隐藏层,以及一个输出层用来产生一个标签(不管是分类还是回归,都一样)。
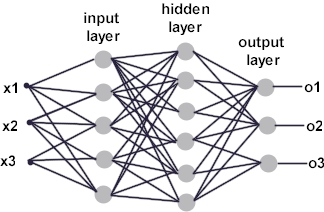
图片来源:http://dms.irb.hr/tutorial/tut_nnets_short.php
在我们使用训练数据之前,我们需要把它的灰度化,把它变成一个二维矩阵。此外,我们将每个值除以255然后减去0.5。当我们对图像进行灰度化时,我们将每一个(R,G,B)元组转换成0到255之间的浮点值)。通过除以255,可以标准化灰度值映射到[0,1]之间。接下来,我们将所有的值减去0.5,映射到区间[ -0.5,0.5 ]上。现在,每个图像都由一个1024维的数组表示,每一个值都在- 0.5到0.5之间。在训练分类网络时,标准化你的输入值在[-1,1]之间是个很常见的做法。
X_train_flat = np.dot(X_train[...,:3], [0.299, 0.587, 0.114]).reshape(X_train.shape[0],-1).astype(np.float32) X_train_flat = (X_train_flat/255.0)-0.5 X_test_flat = np.dot(X_test[...,:3], [0.299, 0.587, 0.114]).reshape(X_test.shape[0],-1).astype(np.float32) X_test_flat = (X_test_flat/255.0)-.5
使用nolearn的API,我们可以很容易地创建一个输入层,隐藏层和输出层的多层感知器。hidden_num_units = 100表示我们的隐藏层有100个神经元,output_num_units = 10则表示我们的输出层有10个神经元,并与标签一一对应。输出前,网络使用 softmax 函数来确定最可能的标签。迭代50次并且设置verbose=1来训练模型,最后会输出每次迭代的结果及其需要的运行时间。
net1 = NeuralNet( layers = [ ('input', layers.InputLayer), ('hidden', layers.DenseLayer), ('output', layers.DenseLayer), ], #layers parameters: input_shape = (None, 1024), hidden_num_units = 100, output_nonlinearity = softmax, output_num_units = 10, #optimization parameters: update = nesterov_momentum, update_learning_rate = 0.01, update_momentum = 0.9, regression = False, max_epochs = 50, verbose = 1, ) 从侧面来说,这个接口使得它很容易建立深层网络。如果我们想要添加第二个隐藏层,我们所需要做的就是把它添加到图层参数中,然后在新增的一层中指定多少个神经元。
net1 = NeuralNet( layers = [ ('input', layers.InputLayer), ('hidden1', layers.DenseLayer), ('hidden2', layers.DenseLayer), #Added Layer Here ('output', layers.DenseLayer), ], #layers parameters: input_shape = (None, 1024), hidden1_num_units = 100, hidden2_num_units = 100, #Added Layer Params Here 现在,正如我前面提到的关于Nolearn类似Scikit-Learn风格的API,我们可以用fit函数来拟合神经网络。
net1.fit(X_train_flat, y_train)
当网络使用GPU训练时,我们可以看到每次迭代时间通常需要0.5秒。

另一方面,当Domino的硬件参数设置为XX-Large(32 core, 60 GB RAM),每次迭代时间通常需要1.3秒。

通过GPU训练的神经网络,我们可以看到在训练网络上大约提速了3倍。正如预期的那样,使用GPU训练好的神经网络和使用CPU训练好的神经网络产生了类似的结果。两者产生了相似的测试精度(约为41%)以及相似的训练损失。
通过下面代码,我们可以在测试数据上测试网络:
y_pred1 = net1.predict(X_test_flat) print "The accuracy of this network is: %0.2f" % (y_pred1 == y_test).mean()
最后,我们在测试数据上得到的精度为41%。
卷积网络
卷积神经网络是一种更为复杂的神经网络结构,它的一个层中的神经元和上一层的一个子集神经元相连。结果,卷积往往会池化每个子集的输出。

图片来源: http://colah.github.io/posts/2014-07-Conv-Nets-Modular/
卷积神经网络在企业和 Kaggle 竞赛 中很受欢迎,因为它能灵活地学习不同的问题并且易扩展。
同样,在我们建立卷积神经网络之前,我们首先必须对数据进行灰度化和变换。这次我们会保持图像32x32的大小不变。此外,我已经修改了矩阵的行顺序,所以每个图像现在被表示为(color,x,y)格式。跟之前一样,我将特征的每个值除以255,再减去0.5,最后将数值映射到区间(-1,1)。
X_train_2d = np.dot(X_train[...,:3], [0.299, 0.587, 0.114]).reshape(-1,1,32,32).astype(np.float32) X_train_2d = (X_train_2d/255.0)-0.5 X_test_2d = np.dot(X_test[...,:3], [0.299, 0.587, 0.114]).reshape(-1,1,32,32).astype(np.float32) X_train_2d = (X_train_2d/255.0)-0.5
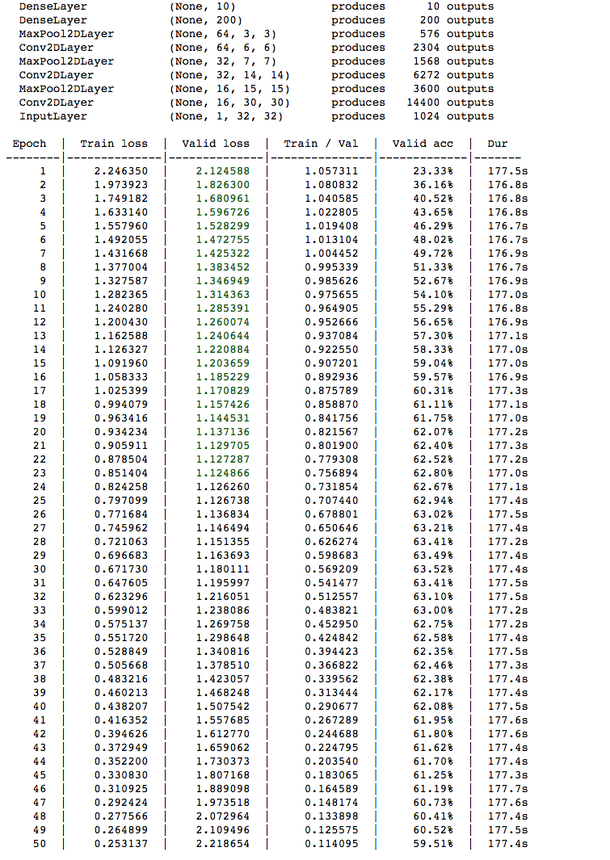
现在我们可以构造卷积神经网络了。该网络由输入层,3个卷积层,3个2x2池化层,200个神经元隐藏层以及最后的输出层构成。
net2 = NeuralNet( layers = [ ('input', layers.InputLayer), ('conv1', layers.Conv2DLayer), ('pool1', layers.MaxPool2DLayer), ('conv2', layers.Conv2DLayer), ('pool2', layers.MaxPool2DLayer), ('conv3', layers.Conv2DLayer), ('pool3', layers.MaxPool2DLayer), ("hidden4", layers.DenseLayer), ("output", layers.DenseLayer), ], #layer parameters: input_shape = (None, 1, 32, 32), conv1_num_filters = 16, conv1_filter_size = (3, 3), pool1_pool_size = (2,2), conv2_num_filters = 32, conv2_filter_size = (2, 2) , pool2_pool_size = (2,2), conv3_num_filters = 64, conv3_filter_size = (2, 2), pool3_pool_size = (2,2), hidden4_num_units = 200, output_nonlinearity = softmax, output_num_units = 10, #optimization parameters: update = nesterov_momentum, update_learning_rate = 0.015, update_momentum = 0.9, regression = False, max_epochs = 5, verbose = 1, ) 接着,我们再次使用fit函数来拟合模型。
net2.fit(X_train_2d, y_train)
与多层感知器相比,卷积神经网络的训练时间会更长。使用GPU来训练,大多数的迭代需要12.8s来完成,然而,卷积神经网络验证损失约为63%,超过了验证损失为40%的多层感知器。也就是说,通过卷积层和池化层的结合,我们可以提高20%的精度。

在只有Domino的XX-大型硬件层的CPU上,每个训练周期大概需要177秒完成,接近于3分钟。也就是说,用GPU训练,训练时间提升了大约15倍。
和前面一样,我们可以看到在CUP上训练的卷积神经网络与GPU上训练的卷积神经网络有着类似的结果,相似的验证精度与训练损失。
此外,当我们在测试数据上测试卷积神经网络时,我们得到了61%的精度。
y_pred2 = net2.predict(X_test_2d) print "The accuracy of this network is: %0.2f" % (y_pred2 == y_test).mean()
建立卷积神经网络的所有代码都可以在ConvolutionNN.py这个 文件 中找到。
最后,正如你所看到的,使用GPU训练的深度神经网络会加快运行加速,在这个项目中它提升的速度在3倍到15倍之间。无论是在工业界还是学术界,我们经常会使用多个GPU,因为这会大大减少深层网络训练的运行时间,通常能从几周下降至几天。
原文链接: Faster deep learning with GPUs and Theano (译者/刘帝伟 审校/刘翔宇、朱正贵 责编/周建丁)
关于译者: 刘帝伟,中南大学软件学院在读研究生,关注机器学习、数据挖掘及生物信息领域。
【预告】 CSDN人工智能用户群深度分享:沈国阳解析美团推荐系统实战心得 ,将于8月11日20:30正式开始。您可以添加微信号“jianding_zhou”申请加入微信群,或申请加入QQ群:465538150。
正文到此结束
热门推荐









相关文章

近期评论
-
谢谢
-
https://www.newcmy.com/register?aff=HBVX建议您试试草莓云机场,可以流畅观看youtube和tiktok,上reddit/x也没有问题,还有各种ai优化节点。
-
-
-
想购买您这个站,我的联系方式QQ741756694微信同步 能卖联系
-
-
-
-
-
https://www.liuhaihua.cn/archives/40657.html 这篇博客中的图片打不开了
Loading...
![[HBLOG]公众号](https://www.liuhaihua.cn/img/qrcode_gzh.jpg)

