《大话存储》作者谈闪存控制器架构
作者: PMC 公司资深数据中心架构师, 《大话存储》系列作者 张冬
分析闪存控制器的架构,首先得了解 SSD 。一般来说 SSD 的存储介质分为两种,一种是采用闪存( Flash 芯片)作为存储介质,另外一种是采用 DRAM 作为存储介质。我们通常所说的 SSD 就是基于闪存的固态硬盘,其采用 FLASH 芯片作为存储介质。 SSD 的基本组成结构包括 Flash 颗粒和 Flash 控制器, Flash 控制器中有芯片,负责 Flash 的读写、磨损均衡、寿命监控等等。
Flash 控制器的主要的工作任务包括三大方面:一是后端访问 Flash ,管理后端 Flash 颗粒,包括各种参数控制和数据 IO; 二是前端提供访问接口和协议:实现对应的 SAS/SATA target 协议端或者 NVMe 协议端 , 获取 Host 发出的 IO 指令并解码和生成内部私有数据结果等待执行;三是 FTL 层核心处理。下面我们具体来介绍一下 Flash 控制器是怎样做这几件事的。
第一,后端访问 Flash 的操作内容
后端访问 Flash 首先必须提到的是闪存通道控制器。这个控制器里面有多个通道,每个通道挂多片 Flash 。它与后端 Flash 颗粒之间存在托管协议。数据写入 Flash 的时候,除了主机发送的数据或者原始数据,其他数据都必须进行 ECC 校验。 ECC 是通用的称谓,里面有多种算法,其中包括纠错率较低的 BCH 算法, LAPC 低密度校验码等。数据读出的时候,通过扰码,加扰,解扰,看 ECC 是否出现错误,若有错则在纠错后将芯片发到内部,供后续的程序处理。因此,后端访问 Flash 的主要任务即是管理后端 Flash 颗粒,包括各种参数控制和数据 IO 。
 第二,前端提供访问接口和协议
第二,前端提供访问接口和协议
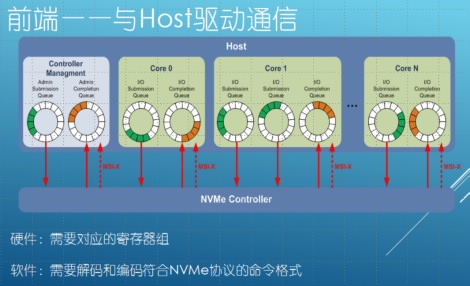
前端提供访问接口和协议,跟主机驱动通信,利用标准格式输配到系统里面,接收主机端发过来的指令,即完成、实现对应的 SAS/SATA target 协议端或者 NVMe 协议端,获取 Host 发出的 IO 指令并解码和生成内部私有数据结构等待执行。如果遵从 NVMe 标准,包括提交命令的方法、完成命令的处理方法等都定好了,包括各种队列、队列深度, Queue Pair 的总体数量最大可以达到 64K 个,队列深度也可达 64K 个,所以,系统里同时可能存在 64K × 64K IO 排着,但是目前的系统是用不到这么多 Queue 的,因为底下的介质速度还不足以支撑。
第三, FTL 层——核心层处理
核心层 FTL 层,是一款 Flash 控制器的关键竞争力所在。它既可以是纯软件算法,包括元数据管理,数据布局影射、磨损均衡、垃圾回收、缓存策略、片间 RAID 和掉电元数据一致性保障等内容。同时,它也可以在进行重复性工作时辅以硬加速引擎。这是非纯软件的,辅有硬加速的成分在里面。硬加速涉及到所使用的芯片。有的芯片支持硬加速,比如说链表的维护。这是因为做垃圾回收时需要要用到链表,拿传统的软件算法,插入一个或者追加一些项目,所耗费的 CPU 周期较大,此时用硬加速并行,再加上一些硬逻辑的加速,则可节省开销。
Flash 控制器的两种策略和方式:
现有的 Flash 控制器可采用两种方式:一种是少量的强核心加少量硬件加速。所谓强核心就是一个核心的性能高、频率高,分支预判、并行度、单元数量、执行管道,各种参数都高于一般水平。核心强了以后,硬加速就不需要这么多了,可以用少量的硬加速。
另一种方式则是大量弱核心 + 大量硬加速。比如说 16 个核心,每个核心比较弱,但是能够增加执行的并行度,有 16 个并发核心执行,跑 16 套处理程序,这是两种架构。这是一种多核心协作架构模式,其协作方式可以是同构协作也可以是异构协作
1. 同构协作就是每个核心做的事都是完全一样的,处理的步骤完全一样。如果你的控制器阵列里面有 16 个 IO ,有 16 个核心,每个核心都能处理一个 IO ,这是同构协作。
2. 异构协作则是多个核心做不同的事情。处理同一个 IO ,第一个 IO 第一步,第一个核心处理,这个核心处理完以后,把这个 IO 扔到下一个核心,再处理下一步,等这个核心空出来以后,处理下一个 IO 的第一步,这就是所谓的流水线了,所谓的异构就是如此。
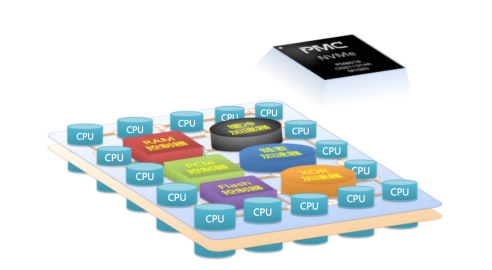
产品实例: PMC 的 FlashtecTM NVMe 控制器
这是 PMC 的控制器,首先它有一个片上网络,网络承载 16 个 CPU 核心,每个核心里面有一个类似网卡的控制器,网卡连到网络上,多个 CPU 之间连起来。简单说就是 4 口路由器或者交换机连起来的网络,多个 CPU 之间连起来,此外还有硬加速模块。另外还包括以下几部分:
· RAM 控制器,因为芯片上需要有一定量的 RAM 放临时数据,写放大,读出来写进去,都要走 RAM ;
· PCIe 控制器,这个是跟前端 PCIe 对等的控制器, IO 指令从这儿接收过来;
· 后端 Flash 控制器,通过一定数量的通道连 Flash 颗粒,
· 加速器(包括缓冲加速器),每做一个操作,都需要有相应的内存,把数据拷到内存里面,内存的维护很费时费力。比如在 X86 上运行的 Linux ,其管理内存时需要耗费很多的计算量。对于闪存,精打细算,必须把性能做到极致,因此需用到硬加速。
· 链表加速器,用链表来记录一些信息,哪块空着,哪块被应用,这块用软件维护很费力,所以需要在这里作加速 ;
· XOR 加速器, XOR 要用硬加速
· 最后,来看一下软件的并行度。 16 个核心, PMC 提供的参考的固件,当然 SSD 厂商会开发自己的固件,把自己优化的东西放进去,优化的算法放进去。基本上包含了这么一些程序,每个 IO 读的地址可能有重叠,重叠就需要有一个锁定协调,有管命令解析的,有管启动的,有管日志的,有管磨损均衡的,有管查表的,有管写数据的,管前端的 PCIe Manager ,还有负责 boot loader 的核心,初始化的配置,需要由它处理, data manager ,这是主程序,分析 IO 指令需要干什么,生成一堆的后续步骤下发下去。其实每一块都可以跑在一个核心上,同一个角色可以复制多份,充分并行。 16 个核心,达到 16 份程序并行的运行, 16 个流水线的 Stage ,这样就可以屏蔽处理过程中的时延。
正文到此结束
热门推荐










相关文章






Loading...
![[HBLOG]公众号](https://www.liuhaihua.cn/img/qrcode_gzh.jpg)

