源码分析:Java对象的内存分配
Java对象的分配,根据其过程,将其分为快速分配和慢速分配两种形式,其中快速分配使用无锁的指针碰撞技术在新生代的Eden区上进行分配,而慢速分配根据堆的实现方式、GC的实现方式、代的实现方式不同而具有不同的分配调用层次。下面就以bytecodeInterpreter解释器对于new指令的解释出发,分析实例对象的内存分配过程:
一、快速分配
1.实例的创建首先需要知道该类型是否被加载和正确解析,根据字节码所指定的CONSTANT_Class_info常量池索引,获取对象的类型信息并调用is_unresovled_klass()验证该类是否被解析过,在创建类的实例之前,必须确保该类型已经被正确加载和解析。
CASE(_new): { u2 index = Bytes::get_Java_u2(pc+1); constantPoolOop constants = istate->method()->constants(); if (!constants->tag_at(index).is_unresolved_klass()) { 2.接下来获取该类型在虚拟机中的表示instanceKlass(具体可以参考前文 实例探索Java对象的组织结构 )
oop entry = constants->slot_at(index).get_oop(); assert(entry->is_klass(), "Should be resolved klass"); klassOop k_entry = (klassOop) entry; assert(k_entry->klass_part()->oop_is_instance(), "Should be instanceKlass"); instanceKlass* ik = (instanceKlass*) k_entry->klass_part();
3.当类型已经被初始化并且可以被快速分配时,那么将根据UseTLAB来决定是否使用TLAB技术(Thread-Local Allocation Buffers,线程局部分配缓存技术)来将分配工作交由线程自行完成。TLAB是每个线程在Java堆中预先分配了一小块内存,当有对象创建请求内存分配时,就会在该块内存上进行分配,而不需要在Eden区通过同步控制进行内存分配。
if ( ik->is_initialized() && ik->can_be_fastpath_allocated() ) { size_t obj_size = ik->size_helper(); oop result = NULL; // If the TLAB isn't pre-zeroed then we'll have to do it bool need_zero = !ZeroTLAB; if (UseTLAB) { result = (oop) THREAD->tlab().allocate(obj_size); } if (result == NULL) { need_zero = true; 4.如果不使用TLAB或在TLAB上分配失败,则会尝试在堆的Eden区上进行分配。Universe::heap()返回虚拟机内存体系所使用的CollectedHeap,其top_addr()返回的是Eden区空闲块的起始地址变量_top的地址,end_addr()是Eden区空闲块的结束地址变量_end的地址。 故这里compare_to是Eden区空闲块的起始地址,new_top为使用该块空闲块进行分配后新的空闲块起始地址。这里使用CAS操作进行空闲块的同步操作,即观察_top的预期值,若与compare_to相同,即没有其他线程操作该变量,则将new_top赋给_top真正成为新的空闲块起始地址值,这种分配技术叫做bump-the-pointer(指针碰撞技术)。
retry: HeapWord* compare_to = *Universe::heap()->top_addr(); HeapWord* new_top = compare_to + obj_size; if (new_top <= *Universe::heap()->end_addr()) { if (Atomic::cmpxchg_ptr(new_top, Universe::heap()->top_addr(), compare_to) != compare_to) { goto retry; } result = (oop) compare_to; } } 5.根据是否需要填0选项,对分配空间的对象数据区进行填0
if (result != NULL) { // Initialize object (if nonzero size and need) and then the header if (need_zero ) { HeapWord* to_zero = (HeapWord*) result + sizeof(oopDesc) / oopSize; obj_size -= sizeof(oopDesc) / oopSize; if (obj_size > 0 ) { memset(to_zero, 0, obj_size * HeapWordSize); } } 6.根据是否使用偏向锁,设置对象头信息,然后设置对象的klassOop引用(这样对象本身就获取了获取类型数据的途径)
if (UseBiasedLocking) { result->set_mark(ik->prototype_header()); } else { result->set_mark(markOopDesc::prototype()); } result->set_klass_gap(0); result->set_klass(k_entry); 7.把对象地址引入栈,并继续执行下一个字节码
SET_STACK_OBJECT(result, 0); UPDATE_PC_AND_TOS_AND_CONTINUE(3, 1);
8.若该类型没有被解析,就会调用InterpreterRuntime的_new函数完成慢速分配
// Slow case allocation CALL_VM(InterpreterRuntime::_new(THREAD, METHOD->constants(), index), handle_exception); SET_STACK_OBJECT(THREAD->vm_result(), 0); THREAD->set_vm_result(NULL); UPDATE_PC_AND_TOS_AND_CONTINUE(3, 1);
以上就是快速分配的过程,其流程图如下,关键在于快速分配在Eden区所使用的无锁指针碰撞技术

二、慢速分配
接下来看看慢速分配是如何进行的:1.InterpreterRuntime的_new函数定义在/hotspot/src/share/vm/interpreter/interpreterRuntime.cpp中:
IRT_ENTRY(void, InterpreterRuntime::_new(JavaThread* thread, constantPoolOopDesc* pool, int index)) klassOop k_oop = pool->klass_at(index, CHECK); instanceKlassHandle klass (THREAD, k_oop); // Make sure we are not instantiating an abstract klass klass->check_valid_for_instantiation(true, CHECK); // Make sure klass is initialized klass->initialize(CHECK); oop obj = klass->allocate_instance(CHECK); thread->set_vm_result(obj); IRT_END
该函数在进行了对象类的检查(确保不是抽象类)和对该类型进行初始化后,调用instanceKlassHandle的allocate_instance进行内存分配。其中instanceKlassHandle类由DEF_KLASS_HANDLE宏进行声明,注意该类重载了成员访问运算符”->”,这里的一系列成员方法的访问实际上是instanceKlass对象的访问。
type* operator -> () const { return (type*)obj()->klass_part(); } 2.所以实际上是调用了instanceKlass的allocate_instance()成员函数:
allocate_instance()定义在/hotspot/src/share/vm/oops/instanceKlass.cpp
(1).检查是否设置了Finalizer函数,获取对象所需空间的大小
instanceOop instanceKlass::allocate_instance(TRAPS) { bool has_finalizer_flag = has_finalizer(); // Query before possible GC int size = size_helper(); // Query before forming handle. (2).调用CollectedHeap的obj_allocate()创建一个instanceOop(堆上的对象实例),并根据情况注册Finalizer函数
KlassHandle h_k(THREAD, as_klassOop()); instanceOop i; i = (instanceOop)CollectedHeap::obj_allocate(h_k, size, CHECK_NULL); if (has_finalizer_flag && !RegisterFinalizersAtInit) { i = register_finalizer(i, CHECK_NULL); } return i; 3.CollectedHeap::ojb_allocate()定义在/hotspot/src/share/vm/gc_interface/CollectedHeap.hpp中,它将转而调用内联函数obj_allocate()
4.obj_allocate()定义在/hotspot/src/share/vm/gc_interface/CollectedHeap.inline.h中,若当正处于gc状态时,不允许进行内存分配申请,否则将调用common_mem_allocate_init()进行内存分配并返回获得内存的起始地址,随后将调用post_allocation_setup_obj()进行一些初始化工作
oop CollectedHeap::obj_allocate(KlassHandle klass, int size, TRAPS) { //...assert HeapWord* obj = common_mem_allocate_init(size, false, CHECK_NULL); post_allocation_setup_obj(klass, obj, size); NOT_PRODUCT(Universe::heap()->check_for_bad_heap_word_value(obj, size)); return (oop)obj; } 5.common_mem_allocate_init()分为两部分,将分别调用common_mem_allocate_noinit()进行内存空间的分配和调用init_obj()进行对象空间的初始化
HeapWord* CollectedHeap::common_mem_allocate_init(size_t size, bool is_noref, TRAPS) { HeapWord* obj = common_mem_allocate_noinit(size, is_noref, CHECK_NULL); init_obj(obj, size); return obj; } 6.common_mem_allocate_noinit()如下:(1).若使用了本地线程分配缓冲TLAB,则会调用allocate_from_tlab()尝试从TLAB中分配内存
HeapWord* result = NULL; if (UseTLAB) { result = CollectedHeap::allocate_from_tlab(THREAD, size); if (result != NULL) { assert(!HAS_PENDING_EXCEPTION, "Unexpected exception, will result in uninitialized storage"); return result; } } (2).否则会调用 堆的mem_allocate() 尝试分配
bool gc_overhead_limit_was_exceeded = false; result = Universe::heap()->mem_allocate(size, is_noref, false, &gc_overhead_limit_was_exceeded);
(3).统计分配的字节数
if (result != NULL) { //... THREAD->incr_allocated_bytes(size * HeapWordSize); return result; } (4).否则说明申请失败,若在申请过程中gc没有超时,则抛出OOM异常
if (!gc_overhead_limit_was_exceeded) { // -XX:+HeapDumpOnOutOfMemoryError and -XX:OnOutOfMemoryError support report_java_out_of_memory("Java heap space"); if (JvmtiExport::should_post_resource_exhausted()) { JvmtiExport::post_resource_exhausted( JVMTI_RESOURCE_EXHAUSTED_OOM_ERROR | JVMTI_RESOURCE_EXHAUSTED_JAVA_HEAP, "Java heap space"); } THROW_OOP_0(Universe::out_of_memory_error_java_heap()); 7.对象内存分配后的初始化过程包括两部分,一个是init_obj()完成对对象内存空间的对齐和填充,一个是post_allocation_setup_obj()对堆上的oop对象进行初始化。
(1).init_obj():
void CollectedHeap::init_obj(HeapWord* obj, size_t size) { assert(obj != NULL, "cannot initialize NULL object"); const size_t hs = oopDesc::header_size(); assert(size >= hs, "unexpected object size"); ((oop)obj)->set_klass_gap(0); Copy::fill_to_aligned_words(obj + hs, size - hs); } hs就是对象头的大小,fill_to_aligned_words将对象空间除去对象头的部分做填0处理,该函数定义在/hotspot/src/share/vm/utilities/copy.h中,并转而调用pd_fill_to_aligned_words()。pd_fill_to_aligned_words根据不同平台实现,以x86平台为例,该函数定义在/hotspot/src/cpu/x86/vm/copy_x86.h中:
static void pd_fill_to_words(HeapWord* tohw, size_t count, juint value) { #ifdef AMD64 julong* to = (julong*) tohw; julong v = ((julong) value << 32) | value; while (count-- > 0) { *to++ = v; } #else juint* to = (juint*)tohw; count *= HeapWordSize / BytesPerInt; while (count-- > 0) { *to++ = value; } #endif // AMD64 } 该函数的作用就是先将地址类型转换,然后把堆的字数转化为字节数,再对该段内存进行填值(value = 0)处理
(2).post_allocation_setup_obj()调用了post_allocation_setup_common()进行初始化工作,然后调用post_allocation_notify()通知JVMTI和dtrace
void CollectedHeap::post_allocation_setup_obj(KlassHandle klass, HeapWord* obj, size_t size) { post_allocation_setup_common(klass, obj, size); assert(Universe::is_bootstrapping() || !((oop)obj)->blueprint()->oop_is_array(), "must not be an array"); // notify jvmti and dtrace post_allocation_notify(klass, (oop)obj); } post_allocation_setup_common()如下:
void CollectedHeap::post_allocation_setup_common(KlassHandle klass, HeapWord* obj, size_t size) { post_allocation_setup_no_klass_install(klass, obj, size); post_allocation_install_obj_klass(klass, oop(obj), (int) size); } post_allocation_setup_no_klass_install()根据是否使用偏向锁,设置对象头信息等,即初始化oop的_mark字段。post_allocation_install_obj_klass()设置对象实例的klassOop引用,即初始化oop的_metadata(_klass/_compressed_klass)字段 。
以上内容就是堆实现无关的慢速分配过程,其流程图如下:
三、堆的分配实现
1.mem_allocate将由堆的实现类型定义,以GenCollectedHeap为例:
HeapWord* GenCollectedHeap::mem_allocate(size_t size, bool is_large_noref, bool is_tlab, bool* gc_overhead_limit_was_exceeded) { return collector_policy()->mem_allocate_work(size, is_tlab, gc_overhead_limit_was_exceeded); } 2.由之前分析,GenCollectedHeap根据用户配置有着不同的GC策略(默认的和配置UseSerialGC的MarkSweepPolicy、配置UseComcMarkSweepGC和UseAdaptiveSizePolicy的ASConcurrentMarkSweepPolicy、只配置UseComcMarkSweepGC的ConcurrentMarkSweepPolicy),但这里,对象内存空间的基本结构和分配的思想是一致的,所以统一由GenCollectorPolicy实现进行分代层级的对象分配操作,但具体的工作将交由各代的实现者来完成。
GenCollectedPolicy的mem_allocate_work()函数如下:(1).gch指向GenCollectedHeap堆,内存分配请求将循环不断地进行尝试,直到分配成功或GC后分配失败
HeapWord* GenCollectorPolicy::mem_allocate_work(size_t size, bool is_tlab, bool* gc_overhead_limit_was_exceeded) { GenCollectedHeap *gch = GenCollectedHeap::heap(); //... // Loop until the allocation is satisified, // or unsatisfied after GC. for (int try_count = 1; /* return or throw */; try_count += 1) { 对于占用空间比较大的对象,如果经常放在新生代,那么剩余的内存空间就会非常紧张,将可能会导致新生代内存垃圾回收的频繁触发。故若对象的大小超过一定值,那么就不应该分配在新生代。
//...紧接上面部分 HandleMark hm; // discard any handles allocated in each iteration // First allocation attempt is lock-free. Generation *gen0 = gch->get_gen(0); if (gen0->should_allocate(size, is_tlab)) { result = gen0->par_allocate(size, is_tlab); if (result != NULL) { assert(gch->is_in_reserved(result), "result not in heap"); return result; } } 若对象应该在新生代上分配,就会调用新生代的par_allocate()进行分配,注意在 新生代 普遍是采用复制收集器的,而内存的分配对应采用了无锁式的指针碰撞技术。
(2).在新生代上尝试无锁式的分配失败,那么就获取堆的互斥锁,并尝试在各代空间内进行内存分配
unsigned int gc_count_before; // read inside the Heap_lock locked region { MutexLocker ml(Heap_lock); //... bool first_only = ! should_try_older_generation_allocation(size); result = gch->attempt_allocation(size, is_tlab, first_only); if (result != NULL) { assert(gch->is_in_reserved(result), "result not in heap"); return result; } 其中should_try_older_generation_allocation()如下:
bool GenCollectorPolicy::should_try_older_generation_allocation( size_t word_size) const { GenCollectedHeap* gch = GenCollectedHeap::heap(); size_t gen0_capacity = gch->get_gen(0)->capacity_before_gc(); return (word_size > heap_word_size(gen0_capacity)) || GC_locker::is_active_and_needs_gc() || gch->incremental_collection_failed(); } 当进行gc前,新生代的空闲空间大小不足以分配对象,或者有线程触发了gc,或前一次的FullGC是由MinorGC触发的情况,都应该不再尝试再更高的内存代上进行分配,以保证新分配的对象尽可能在新生代空间上。
attempt_allocation()实现如下:
HeapWord* GenCollectedHeap::attempt_allocation(size_t size, bool is_tlab, bool first_only) { HeapWord* res; for (int i = 0; i < _n_gens; i++) { if (_gens[i]->should_allocate(size, is_tlab)) { res = _gens[i]->allocate(size, is_tlab); if (res != NULL) return res; else if (first_only) break; } } // Otherwise... return NULL; } 即由低内存代向高内存代尝试分配内存
(3).从各个代空间都找不到可用的空闲内存(或不应该在更高的内存代上分配时),如果已经有线程触发了gc,那么当各代空间还有virtual space可扩展空间可用时,将会尝试扩展代空间并再次尝试进行内存分配,有点在gc前想尽一切办法获得内存的意思。
if (GC_locker::is_active_and_needs_gc()) { if (is_tlab) { return NULL; // Caller will retry allocating individual object } if (!gch->is_maximal_no_gc()) { // Try and expand heap to satisfy request result = expand_heap_and_allocate(size, is_tlab); // result could be null if we are out of space if (result != NULL) { return result; } } (4).否则各代已经没有可用的可扩展空间时,当当前线程没有位于jni的临界区时,将释放堆的互斥锁,以使得请求gc的线程可以进行gc操作,等待所有本地线程退出临界区和gc完成后,将继续循环尝试进行对象的内存分配
JavaThread* jthr = JavaThread::current(); if (!jthr->in_critical()) { MutexUnlocker mul(Heap_lock); // Wait for JNI critical section to be exited GC_locker::stall_until_clear(); continue; } (5).若各代无法分配对象的内存,并且没有gc被触发,那么当前请求内存分配的线程将发起一次gc,这里将提交给VM一个GenCollectForAllocation操作以触发gc,当操作执行成功并返回时,若gc锁已被获得,那么说明已经由其他线程触发了gc,将继续循环以等待gc完成
VM_GenCollectForAllocation op(size, is_tlab, gc_count_before); VMThread::execute(&op); if (op.prologue_succeeded()) { result = op.result(); if (op.gc_locked()) { assert(result == NULL, "must be NULL if gc_locked() is true"); continue; // retry and/or stall as necessary } 否则将等待gc完成,若gc超时则会将gc_overhead_limit_was_exceeded设置为true返回给调用者,并重置超时状态,并对分配的对象进行填充处理
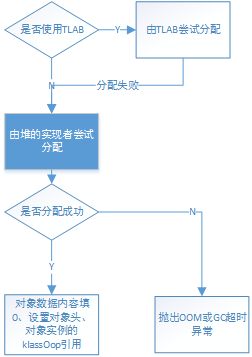
const bool limit_exceeded = size_policy()->gc_overhead_limit_exceeded(); const bool softrefs_clear = all_soft_refs_clear(); assert(!limit_exceeded || softrefs_clear, "Should have been cleared"); if (limit_exceeded && softrefs_clear) { *gc_overhead_limit_was_exceeded = true; size_policy()->set_gc_overhead_limit_exceeded(false); if (op.result() != NULL) { CollectedHeap::fill_with_object(op.result(), size); } return NULL; } 以上内容就是堆的实现相关、但代/GC实现无关的分配过程,其流程图归纳如下:

正文到此结束
热门推荐










相关文章






Loading...
![[HBLOG]公众号](https://www.liuhaihua.cn/img/qrcode_gzh.jpg)

