SLAM拾萃(1):octomap
前言
大家好,时隔多年之后,我又开始了博客旅程。经历了很多事情之后呢,我发现自己的想法真的很简单:好好读书做课题,闲下来时写写博客,服务大家。所以我会继续写SLAM相关的博客。如果你觉得它对你有帮助,那是最好不过的啦!写作过程中得到了许多热心读者的帮助与鼓励,有些读者还成了要好的朋友,在此向大家致谢啦!关于SLAM,读者也会有很多问题。由于我个人精力和学力都有限,无法一一回答,向大家说声抱歉!有些共同的问题,我肯定会在博客里介绍的!
前两天刚从珠海开会回来,与中山大学的同学们聚在一起玩耍,很开心!

《一起做》系列已经结束,事实上它是我以前探索过程中的一些总结。虽然仍然有很多令人不满意的地方,不过相信读了那个系列,读者应该对SLAM的流程有一定的了解了。尤其是通过代码,你能知道许多论文里没讲清楚的细节。在这之后,我现在有两个规划。一是对目前流行的SLAM程序做一个介绍,沿着《视觉SLAM实战》往下写;二是介绍一些好用的开源工具/库,写成一个《SLAM拾萃》。我觉得这两部分内容,对读者了解SLAM会有较大的帮助。当然,如果你对我的博客有任何建议,可以在下方评论或给我发邮件。
本篇是《SLAM拾萃》第一篇,介绍一个建图工具:octomap。和往常一样,我会介绍它的原理、安装与使用方式,并提供例程供读者学习。必要时也会请小萝卜过来吐槽。(小萝卜真是太好用了,它可以代替读者提很多问题。)
什么是octomap?
RGBD SLAM的目的有两个:估计机器人的轨迹,并建立正确的地图。地图有很多种表达方式,比如特征点地图、网格地图、拓扑地图等等。在《一起做》系列中,我们使用的地图形式主要是点云地图。在程序中,我们根据优化后的位姿,拼接点云,最后构成地图。这种做法很简单,但有一些明显的缺陷:
- 地图形式不紧凑。
点云地图通常规模很大,所以一个pcd文件也会很大。一张640$/times$480的图像,会产生30万个空间点,需要大量的存储空间。即使经过一些滤波之后,pcd文件也是很大的。而且讨厌之处在于,它的“大”并不是必需的。 点云地图提供了很多不必要的细节 。对于地毯上的褶皱、阴暗处的影子,我们并不特别关心这些东西。把它们放在地图里是浪费空间。 - 处理重叠的方式不够好。
在构建点云时,我们直接按照估计位姿拼在了一起。 在位姿存在误差时,会导致地图出现明显的重叠 。例如一个电脑屏变成了两个,原本方的边界变成了多边形。对重叠地区的处理方式应该更好一些。 - 难以用于导航
说起地图的用处,第一就是导航啦!有了地图,就可以指挥机器人从A点到B点运动,岂不是很方便的事?但是,给你一张点云地图,是否有些傻眼了呢?我至少得知道哪些地方可通过,哪些地方不可通过,才能完成导航呀! 光有点是不够的 !
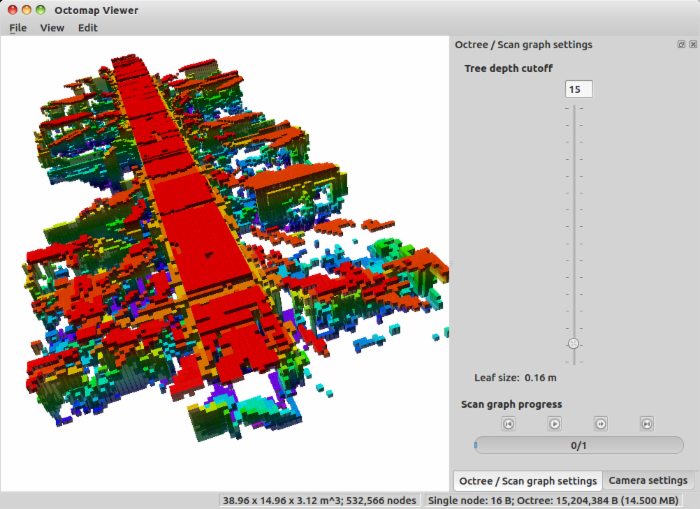
octomap就是为此而设计的!亲,你没有看错,它可以优雅地压缩、更新地图,并且分辨率可调!它以八叉树(octotree,后面会讲)的形式存储地图,相比点云,能够省下大把的空间。octomap建立的地图大概是这样子的:(从左到右是不同的分辨率)
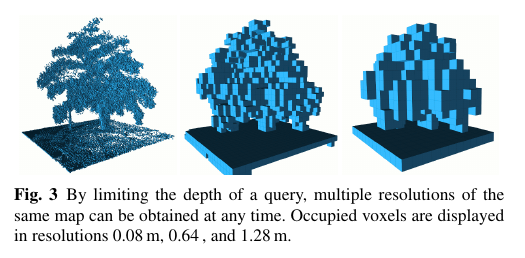
由于八叉树的原因,它的地图像是很多个小方块组成的(很像minecraft)。当分辨率较高时,方块很小;分辨率较低时,方块很大。每个方块表示该格被占据的概率。因此你可以查询某个方块或点“是否可以通过”,从而实现不同层次的导航。简而言之,环境较大时采用较低分辨率,而较精细的导航可采用较高分辨率。
小萝卜:师兄你这是介绍吗?真像广告啊……
octomap原理
本段会讲一些数学知识。如果你想“跑跑程序看效果”,可以跳过本段。
- 八叉树的表达
八叉树,也就是传说中有八个子节点的树!是不是很厉害呢?至于为什么要分成八个子节点,想象一下一个正方形的方块的三个面各切一刀,不就变成八块了嘛!如果你想象不出来,请看下图:
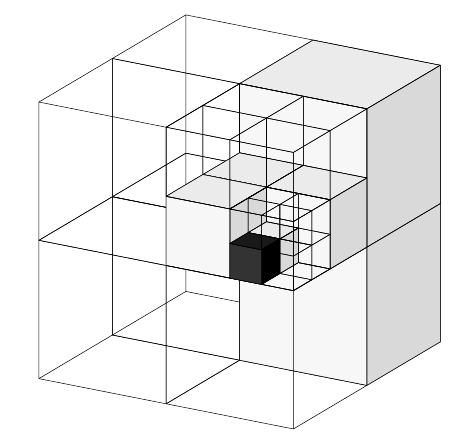
实际的数据结构呢,就是一个树根不断地往下扩,每次分成八个枝,直到叶子为止。叶子节点代表了分辨率最高的情况。例如分辨率设成0.01m,那么每个叶子就是一个1cm见方的小方块了呢!
每个小方块都有一个数描述它是否被占据。在最简单的情况下,可以用0-1两个数表示(太简单了所以没什么用)。通常还是用0~1之间的浮点数表示它被占据的概率。0.5表示未确定,越大则表示被占据的可能性越高,反之亦然。由于它是八叉树,那么一个节点的八个孩子都有一定的概率被占据或不被占据啦!(下图是一棵八叉树)
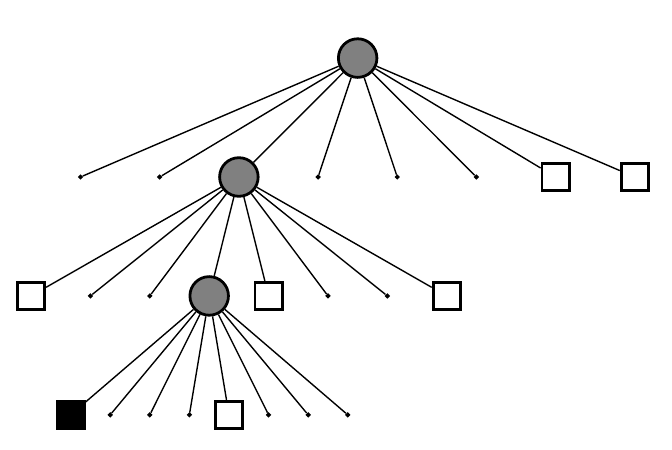
用树结构的好处时: 当某个节点的子结点都“占据”或“不占据”或“未确定”时,就可以把它给剪掉 !换句话说,如果没必要进一步描述更精细的结构(孩子节点)时,我们只要一个粗方块(父节点)的信息就够了。这可以省去很多的存储空间。因为我们不用存一个“全八叉树”呀!
2. 八叉树的更新
在八叉树中,我们用概率来表达一个叶子是否被占据。为什么不直接用0-1表达呢?因为在对环境的观测过程中,由于噪声的存在,某个方块有时可能被观测到是“占据”的,过了一会儿,在另一些方块中又是“不占据”的。有时“占据”的时候多,有时“不占据”的时候多。这一方面可能是由于环境本身有动态特征(例如桌子被挪走了),另一方面(多数时候)可能是由于噪声。根据八叉树的推导,假设$t=1,/ldots, T$时刻,观测的数据为$z_1, /ldots, z_T$,那么第$n$个叶子节点记录的信息为:$$ P(n|z_{1:T}) = /left[ 1+ /frac{1-P(n|z_T)}{P(n|z_T)} /frac{1-P(n|z_{1:T-1})}{P(n|z_{1:T-1})} /frac{P(n)}{1-P(n)} /right]^{-1} /quad /quad (1)$$
小萝卜:哇!又一个好长的式子!这说的是啥师兄?
师兄:哎,写论文非得把一些简单的事情写得很复杂。为了解释这东西,先讲一下 logit 变换。该变换把一个概率$p$变换到全实数空间$R$上: $$ /alpha = logit(p) = log /left( /frac{p}{1-p} /right) $$
这是一个可逆变换,反之有: $$ p = logit^{-1} (/alpha) = /frac{1} { 1+ exp(-/alpha) }. $$
$/alpha$叫做log-odds。我们把用$L()$叶子节点的log-odds,那么(1)就可以写成: $$ L( n| z_{1:T} ) = L(n|z_{1:T-1}) + L(n|z_T) $$
小萝卜:哦!这个我就懂了!每新来一个就直接加到原来的上面,是吧?
师兄:对,此外还要加一个最大最小值的限制。最后转换回原来的概率即可。
八叉树中的父亲节点占据概率,可以根据孩子节点的数值进行计算。比较简单的是取平均值或最大值。如果把八叉树按照占据概率进行渲染,不确定的方块渲染成透明的,确定占据的渲染成不透明的,就能看到我们平时见到的那种东西啦!
octomap本身的数学原理还是简单的。不过它的可视化做的比较好。下面我们来讲讲如何下载、安装八叉树程序,并给出几个小的例程。
安装octomap
octomap的网页见:https://octomap.github.io
它的github源码在:https://github.com/OctoMap/octomap
它还有ROS下的安装方式:http://wiki.ros.org/octomap
在开发过程中,可能需要不断地查看它的API文档。你可以自己用doxygen生成一个,或者查看在线文档:http://octomap.github.io/octomap/doc/
为了保持简洁,我们不要求读者安装ROS,仅介绍单独的octomap。我的编译环境是ubuntu 14.04。ubuntu系列的应该都不会有太大问题。
1. 编译octomap新建一个目录,拷贝octomap代码。如果没有git请安装git:sudo apt-get install git
-
git clone https://github.com/OctoMap/octomap
git会把代码拷贝到当前目录/octomap下。进入该目录,参照README.md进行安装。编译方式和普通的cmake程序一样,如果你学过《一起做》就应该很熟悉了:
1 mkdir build 2 cd build 3 cmake .. 4 make
事实上,octomap的代码主要含两个模块:本身的octomap和可视化工具octovis。octovis依赖于qt4和qglviewer,所以如果你没有装这两个依赖,请安装它们:sudo apt-get install libqt4-dev qt4-qmake libqglviewer-dev
如果编译没有给出任何警告,恭喜你编译成功!
- 使用octovis查看示例地图
在bin/文件夹中,存放着编译出来可执行文件。为了直观起见,我们直接看一个示例地图:
bin/octovis octomap/share/data/geb079.bt
octovis会打开这个地图并显示。它的UI是长这样的。你可以玩玩菜单里各种东西(虽然也不多,我就不一一介绍UI怎么玩了),能看出这是一层楼的扫描图。octovis是一个比较实用的工具,你生成的各种octomap地图都可以用它来看。(所以你可以把octovis放到/usr/local/bin/下,省得以后还要找。)
例程1:转换pcd到octomap
GUI玩够了吧?仅仅会用UI是不够滴,现在让我们开始编代码使用octomap这个库吧!
我为你准备了三个小例程。在前两个中,我会教你如何将一个pcd格式的点云地图转换为octomap地图。后一个中,我会讲讲如何根据g2o优化的轨迹,以类似slam的方式,把几个RGBD图像拼接出一个octomap。这对你研究SLAM会有一些帮助。所有的代码与数据都可以在我的github上找到。有关编译的信息,我写在这个代码的Readme中了,请在编译前看一眼如何编译这些代码。
源代码地址: https://github.com/gaoxiang12/octomap_tutor
源代码如下:src/pcd2octomap.cpp 这份代码将命令行参数1作为输入文件,参数2作为输出文件,把输入的pcd格式点云转换成octomap格式的点云。通过这个例子,你可以学会如何创建一个简单的OcTree对象并往里面添加新的点。
1 #include <iostream> 2 #include <assert.h> 3 4 //pcl 5 #include <pcl/io/pcd_io.h> 6 #include <pcl/point_types.h> 7 8 //octomap 9 #include <octomap/octomap.h> 10 using namespace std; 11 12 int main( int argc, char** argv ) 13 { 14 if (argc != 3) 15 { 16 cout<<"Usage: pcd2octomap <input_file> <output_file>"<<endl; 17 return -1; 18 } 19 20 string input_file = argv[1], output_file = argv[2]; 21 pcl::PointCloud<pcl::PointXYZRGBA> cloud; 22 pcl::io::loadPCDFile<pcl::PointXYZRGBA> ( input_file, cloud ); 23 24 cout<<"point cloud loaded, piont size = "<<cloud.points.size()<<endl; 25 26 //声明octomap变量 27 cout<<"copy data into octomap..."<<endl; 28 // 创建八叉树对象,参数为分辨率,这里设成了0.05 29 octomap::OcTree tree( 0.05 ); 30 31 for (auto p:cloud.points) 32 { 33 // 将点云里的点插入到octomap中 34 tree.updateNode( octomap::point3d(p.x, p.y, p.z), true ); 35 } 36 37 // 更新octomap 38 tree.updateInnerOccupancy(); 39 // 存储octomap 40 tree.writeBinary( output_file ); 41 cout<<"done."<<endl; 42 43 return 0; 44 } 这个代码是相当直观的。在编译之后,它会产生一个可执行文件,叫做pcd2octomap,放在代码根目录的bin/文件夹下。你可以在代码根目录下这样调:
1 bin/pcd2octomap data/sample.pcd data/sample.bt
它会把data文件夹下的sample.pcd(一个示例pcd点云),转换成一个data/sample.bt的octomap文件。你可以比较下pcd点云与octomap的区别。下图是分别调用这些显示命令的结果。
1 pcl_viewer data/sample.pcd 2 octovis data/sample.ot
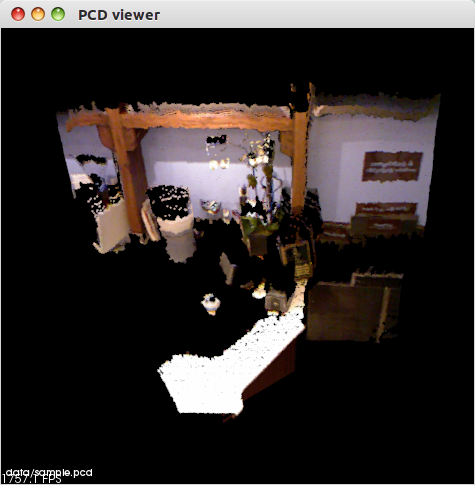
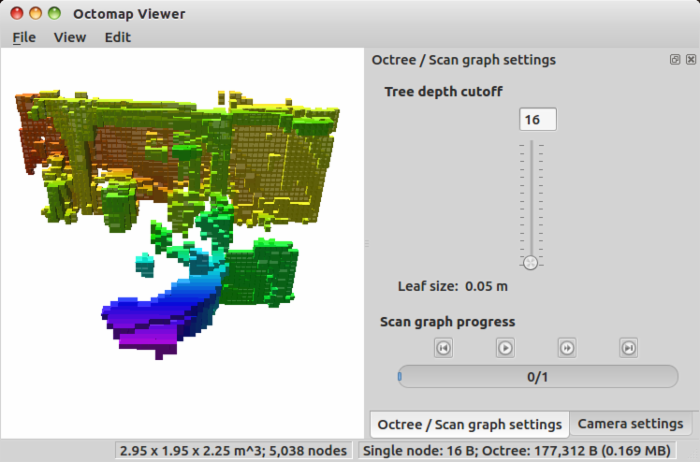
这个octomap里只存储了点的空间信息,而没有颜色信息。我按照高度给它染色了,否则它应该就是灰色的。通过octomap,我们能查看每个小方块是否可以通行,从而实现导航的工作。
以下是对代码的一些注解:
注1:有关如何读取pcd文件,你可以参见pcl官网的tutorial。不过这件事情十分简单,所以我相信你也能直接看懂。
注2:31行采用了C++11标准的for循环,它会让代码看起来稍微简洁一些。如果你的编译器比较老而不支持c++11,你可以自己将它改成传统的for循环的样式。
注3:octomap存储的文件后缀名是.bt(二进制文件)和.ot(普通文件),前者相对更小一些。不过octomap文件普遍都很小,所以也不差这么些容量。如果你存成了其他后缀名,octovis可能认不出来。
例程2:加入色彩信息
第一个示例中,我们将pcd点云转换为octomap。但是pcd点云是有颜色信息的,能否在octomap中也保存颜色信息呢?答案是可以的。octomap提供了ColorOcTree类,能够帮你存储颜色信息。下面我们就来做一个保存颜色信息的示例。代码见:src/pcd2colorOctomap.cpp
1 #include <iostream> 2 #include <assert.h> 3 4 //pcl 5 #include <pcl/io/pcd_io.h> 6 #include <pcl/point_types.h> 7 8 //octomap 9 #include <octomap/octomap.h> 10 #include <octomap/ColorOcTree.h> 11 12 using namespace std; 13 14 int main( int argc, char** argv ) 15 { 16 if (argc != 3) 17 { 18 cout<<"Usage: pcd2colorOctomap <input_file> <output_file>"<<endl; 19 return -1; 20 } 21 22 string input_file = argv[1], output_file = argv[2]; 23 pcl::PointCloud<pcl::PointXYZRGBA> cloud; 24 pcl::io::loadPCDFile<pcl::PointXYZRGBA> ( input_file, cloud ); 25 26 cout<<"point cloud loaded, piont size = "<<cloud.points.size()<<endl; 27 28 //声明octomap变量 29 cout<<"copy data into octomap..."<<endl; 30 // 创建带颜色的八叉树对象,参数为分辨率,这里设成了0.05 31 octomap::ColorOcTree tree( 0.05 ); 32 33 for (auto p:cloud.points) 34 { 35 // 将点云里的点插入到octomap中 36 tree.updateNode( octomap::point3d(p.x, p.y, p.z), true ); 37 } 38 39 // 设置颜色 40 for (auto p:cloud.points) 41 { 42 tree.integrateNodeColor( p.x, p.y, p.z, p.r, p.g, p.b ); 43 } 44 45 // 更新octomap 46 tree.updateInnerOccupancy(); 47 // 存储octomap, 注意要存成.ot文件而非.bt文件 48 tree.write( output_file ); 49 cout<<"done."<<endl; 50 51 return 0; 52 } 大部分代码和刚才是一样的,除了把OcTree改成ColorOcTree,以及调用integrateNodeColor来混合颜色之外。这段代码会编译出pcd2colorOctomap这个程序,完成带颜色的转换。不过,后缀名改成了.ot文件。
1 bin/pcd2colorOctomap data/sample.pcd data/sample.ot
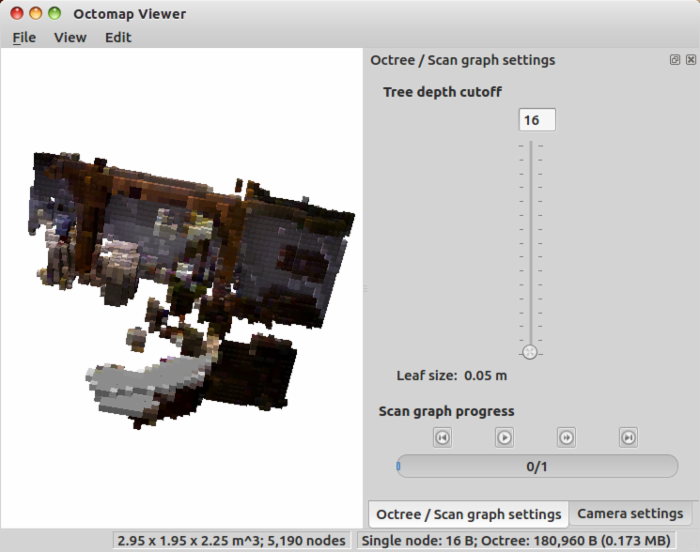
颜色信息能够更好地帮助我们辨认结果是否正确,给予一个直观的印象。是不是好看了一些呢?
例程3:更好的拼接与转换
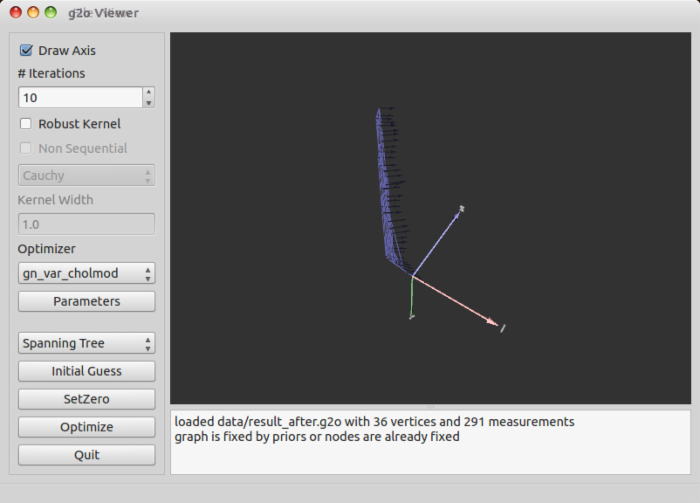
前两个例程中,我们都是对单个pcd文件进行了处理。实际做slam时,我们需要拼接很多帧的octomap。为了做这样一个示例,我从自己的实验数据中取出了一小段。这一小段总共含有五张图像(因为github并不适合传大量数据),它们存放在data/rgb_index和data/dep_index下。我的slam程序估计了这五个关键帧的位置,放在data/trajectory.txt中。它的格式是:帧编号 x y z qx qy qz qw (位置+姿态四元数)。事实上它是从一个g2o文件中拷出来的。你可以用g2o_viewer data/result_after.g2o来看整个轨迹。
54 -0.228993 0.00645704 0.0287837 -0.0004327 -0.113131 -0.0326832 0.993042
144 -0.50237 -0.0661803 0.322012 -0.00152174 -0.32441 -0.0783827 0.942662
230 -0.970912 -0.185889 0.872353 -0.00662576 -0.278681 -0.0736078 0.957536
313 -1.41952 -0.279885 1.43657 -0.00926933 -0.222761 -0.0567118 0.973178
346 -1.55819 -0.301094 1.6215 -0.02707 -0.250946 -0.0412848 0.966741
现在我们要做的事,就是根据trajectory.txt里记录的信息,把几个RGBD图拼成一个octomap。这也是所谓的用octomap来建图。我写了一个示例,不知道你能否读懂呢?src/joinMap.cpp
1 #include <iostream> 2 #include <vector> 3 4 // octomap 5 #include <octomap/octomap.h> 6 #include <octomap/ColorOcTree.h> 7 #include <octomap/math/Pose6D.h> 8 9 // opencv 用于图像数据读取与处理 10 #include <opencv2/core/core.hpp> 11 #include <opencv2/imgproc/imgproc.hpp> 12 #include <opencv2/highgui/highgui.hpp> 13 14 // 使用Eigen的Geometry模块处理3d运动 15 #include <Eigen/Core> 16 #include <Eigen/Geometry> 17 18 // pcl 19 #include <pcl/common/transforms.h> 20 #include <pcl/point_types.h> 21 22 // boost.format 字符串处理 23 #include <boost/format.hpp> 24 25 using namespace std; 26 27 // 全局变量:相机矩阵 28 // 更好的写法是存到参数文件中,但为方便起见我就直接这样做了 29 float camera_scale = 1000; 30 float camera_cx = 325.5; 31 float camera_cy = 253.5; 32 float camera_fx = 518.0; 33 float camera_fy = 519.0; 34 35 int main( int argc, char** argv ) 36 { 37 // 读关键帧编号 38 ifstream fin( "./data/keyframe.txt" ); 39 vector<int> keyframes; 40 vector< Eigen::Isometry3d > poses; 41 // 把文件 ./data/keyframe.txt 里的数据读取到vector中 42 while( fin.peek() != EOF ) 43 { 44 int index_keyframe; 45 fin>>index_keyframe; 46 if (fin.fail()) break; 47 keyframes.push_back( index_keyframe ); 48 } 49 fin.close(); 50 51 cout<<"load total "<<keyframes.size()<<" keyframes. "<<endl; 52 53 // 读关键帧姿态 54 // 我的代码中使用了Eigen来存储姿态,类似的,也可以用octomath::Pose6D来做这件事 55 fin.open( "./data/trajectory.txt" ); 56 while( fin.peek() != EOF ) 57 { 58 int index_keyframe; 59 float data[7]; // 三个位置加一个姿态四元数x,y,z, w,ux,uy,uz 60 fin>>index_keyframe; 61 for ( int i=0; i<7; i++ ) 62 { 63 fin>>data[i]; 64 cout<<data[i]<<" "; 65 } 66 cout<<endl; 67 if (fin.fail()) break; 68 // 注意这里的顺序。g2o文件四元数按 qx, qy, qz, qw来存 69 // 但Eigen初始化按照qw, qx, qy, qz来做 70 Eigen::Quaterniond q( data[6], data[3], data[4], data[5] ); 71 Eigen::Isometry3d t(q); 72 t(0,3) = data[0]; t(1,3) = data[1]; t(2,3) = data[2]; 73 poses.push_back( t ); 74 } 75 fin.close(); 76 77 // 拼合全局地图 78 octomap::ColorOcTree tree( 0.05 ); //全局map 79 80 // 注意我们的做法是先把图像转换至pcl的点云,进行姿态变换,最后存储成octomap 81 // 因为octomap的颜色信息不是特别方便处理,所以采用了这种迂回的方式 82 // 所以,如果不考虑颜色,那不必转成pcl点云,而可以直接使用octomap::Pointcloud结构 83 84 for ( size_t i=0; i<keyframes.size(); i++ ) 85 { 86 pcl::PointCloud<pcl::PointXYZRGBA> cloud; 87 cout<<"converting "<<i<<"th keyframe ..." <<endl; 88 int k = keyframes[i]; 89 Eigen::Isometry3d& pose = poses[i]; 90 91 // 生成第k帧的点云,拼接至全局octomap上 92 boost::format fmt ("./data/rgb_index/%d.ppm" ); 93 cv::Mat rgb = cv::imread( (fmt % k).str().c_str() ); 94 fmt = boost::format("./data/dep_index/%d.pgm" ); 95 cv::Mat depth = cv::imread( (fmt % k).str().c_str(), -1 ); 96 97 // 从rgb, depth生成点云,运算方法见《一起做》第二讲 98 // 第一次遍历用于生成空间点云 99 for ( int m=0; m<depth.rows; m++ ) 100 for ( int n=0; n<depth.cols; n++ ) 101 { 102 ushort d = depth.ptr<ushort> (m) [n]; 103 if (d == 0) 104 continue; 105 float z = float(d) / camera_scale; 106 float x = (n - camera_cx) * z / camera_fx; 107 float y = (m - camera_cy) * z / camera_fy; 108 pcl::PointXYZRGBA p; 109 p.x = x; p.y = y; p.z = z; 110 111 uchar* rgbdata = &rgb.ptr<uchar>(m)[n*3]; 112 uchar b = rgbdata[0]; 113 uchar g = rgbdata[1]; 114 uchar r = rgbdata[2]; 115 116 p.r = r; p.g = g; p.b = b; 117 cloud.points.push_back( p ); 118 } 119 // 将cloud旋转之后插入全局地图 120 pcl::PointCloud<pcl::PointXYZRGBA>::Ptr temp( new pcl::PointCloud<pcl::PointXYZRGBA>() ); 121 pcl::transformPointCloud( cloud, *temp, pose.matrix() ); 122 123 octomap::Pointcloud cloud_octo; 124 for (auto p:temp->points) 125 cloud_octo.push_back( p.x, p.y, p.z ); 126 127 tree.insertPointCloud( cloud_octo, 128 octomap::point3d( pose(0,3), pose(1,3), pose(2,3) ) ); 129 130 for (auto p:temp->points) 131 tree.integrateNodeColor( p.x, p.y, p.z, p.r, p.g, p.b ); 132 } 133 134 tree.updateInnerOccupancy(); 135 tree.write( "./data/map.ot" ); 136 137 cout<<"done."<<endl; 138 139 return 0; 140 141 } 大部分需要解释的地方,我都在程序里写了注解。我用了一种稍微有些迂回的方式:先把图像转成pcl的点云,变换后再放到octotree中。这种做法的原因是比较便于处理颜色,因为我希望做出带有颜色的地图。如果你不关心颜色,完全可以不用pcl,直接用octomap自带的octomap::pointcloud来完成这件事。
insertPointCloud会比单纯的插入点更好一些。octomap里的pointcloud是一种射线的形式,只有末端才存在被占据的点,中途的点则是没被占据的。这会使一些重叠地方处理的更好。
最后,五帧数据拼接出来的点云大概长这样:
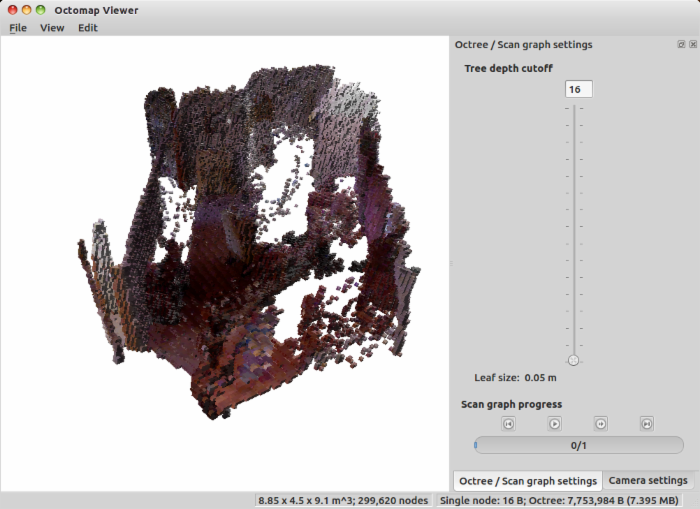
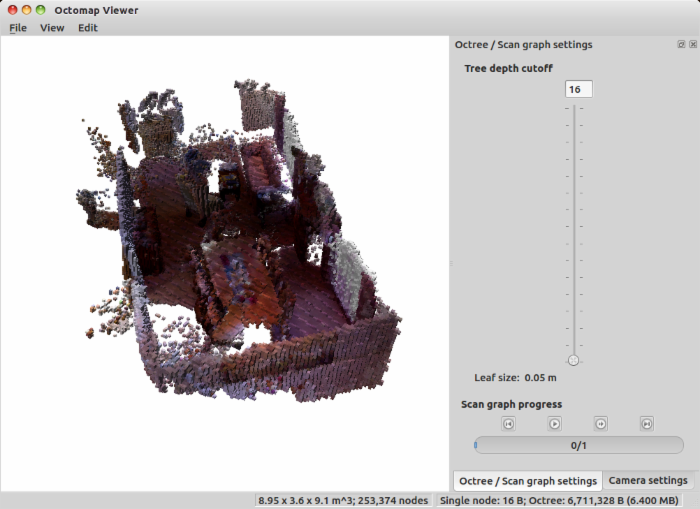
可能并不是特别完整,毕竟我们只用了五张图。这些数据来自于nyud数据集的dining_room序列,一个比较完整的图应该是这样的:
至少是比纯粹点云好些了吧?好了,关于例程就介绍到这里。如果你准备使用octomap,这仅仅是个入门。你需要去查看它的文档,了解它的类结构,以及一些重要类的使用、实现方式。
《SLAM拾萃》第一讲,octomap,就为大家介绍到这里啦。最近我发现自己写东西,讲东西都越来越长,所以请原谅我越来越啰嗦的写作和说话风格。希望它能帮助你!我们下讲再见!
如果你觉得我的博客有帮助,可以进行几块钱的小额赞助,帮助我把博客写得更好。(虽然我也是从别处学来的这招……)
小萝卜:师兄你学坏了啊!
参考文献
[1]. OctoMap: An efficient probabilistic 3D mapping framework based on octrees, Hornung, Armin and Wurm, Kai M and Bennewitz, Maren and Stachniss, Cyrill and Burgard, Wolfram, Autonomous Robots, 2013.
[2]. OctoMap: A probabilistic, flexible, and compact 3D map representation for robotic systems, Wurm, Kai M and Hornung, Armin and Bennewitz, Maren and Stachniss, Cyrill and Burgard, Wolfram, ICRA 2010.
正文到此结束
热门推荐









相关文章

近期评论
-
谢谢
-
https://www.newcmy.com/register?aff=HBVX建议您试试草莓云机场,可以流畅观看youtube和tiktok,上reddit/x也没有问题,还有各种ai优化节点。
-
-
-
想购买您这个站,我的联系方式QQ741756694微信同步 能卖联系
-
-
-
-
-
https://www.liuhaihua.cn/archives/40657.html 这篇博客中的图片打不开了
Loading...
![[HBLOG]公众号](https://www.liuhaihua.cn/img/qrcode_gzh.jpg)

