利用51单片机制作廉价盒仔机器人
转载请注明:@小五义http://www.cnblogs.com/xiaowuyi QQ群:64770604
一、盒仔机器人
BOXZ,昵称盒仔,是一款开源的互动娱乐平台!百度一下,有很多盒仔的制作教程,基本都是用arduino制作完成的。假期没事,带着宝宝们用51制作了一个廉价的BOXZ。先上张图:

从图上不难看出,为了宝宝们易于接受,我把盒仔的手机摇控改成了用线控的方法,做了一个简易的摇控器。
二、材料准备
| 名称 | 型号及参数 | 数量 | 备注 |
| 5V稳压模块 | LM7805 | 1 | |
| 充电电池 | 12V | 1 | |
| 电容 | 22pf | 2 | |
| 按钮 | 4 | ||
| 自锁按钮 | 1 | ||
| 51单片机 | stc12c2052ad | 1 | |
| 晶振 | 11.0592Mhz | 1 | |
| 电机驱动 | L298N模块 | 1 | |
| 降压模块 | 可调,选择12v在可输入范围内,给l298N供电 | 1 | |
| 小车轮子 | 直接65mm,胎宽在26mm或者以下 | 2 | |
| TT电机 | 2 | ||
| 杜邦线 | 若干 | ||
| 螺丝及螺母 | m2*30 | 若干 | |
| 万能板(洞洞板) | 1 | ||
| 六角铜柱 | m3*10 | 若干 | |
| 网线 | 用于连接摇控器与控制板 | 1 | |
| 硬纸板 | 2mm厚 | 若干 |
以上原器件,某宝网上都有。另外,制作中需要用到壁纸刀、电钻、钢尺、胶水等工具。
三、外壳及皮肤制作
1、外壳的制作
(1)下载模板
下载地址:https://yunpan.cn/crIvLu9R8xVyI 访问密码 9fe1
从上面的下载地址下载模板,打印出来,然后将硬纸板切割成图上的样子,怎么切割我就不用说了吧,呵呵。
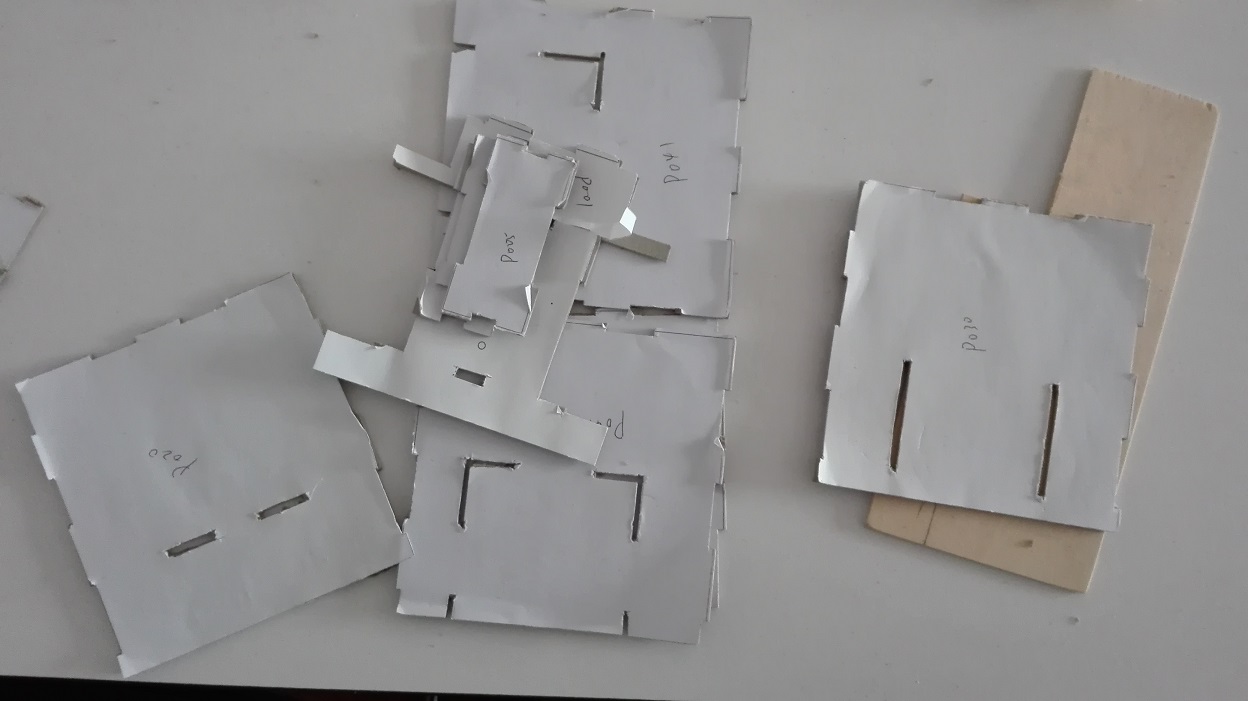
(2)组装

第一步,用到的是P003,2块电机支撑板,用于连接和固定TT减速箱电机(以下简称电机)。在开始安装电机之前,大家可以先把P003实验性的插入P001,从而定义好一个方向,我们的电机都是在支撑板内侧安装的。然后就可以用紧固件分别把电机固定在P003的内侧了。如图每块P003与TT减速箱通过两个M2x30MM的螺丝固定,两边装上轮子。
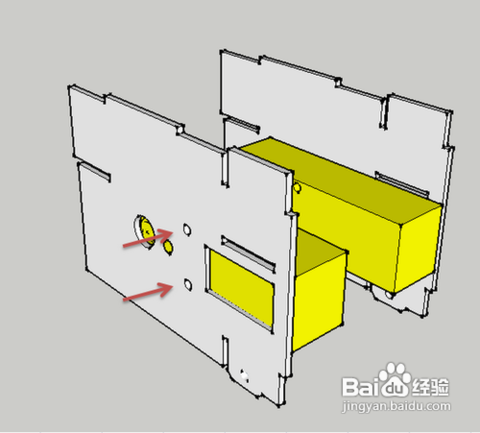

第二步,安装电路板,以及p041、P020、P030以及p050。

以上外壳的安装过程,如果大家没看明白,可以百度一下盒仔机器人,外壳都是一样的。
2、皮肤的制作
下载地址:https://yunpan.cn/crIvwPNjKMrgG 访问密码 825a
网上有很多皮肤,这里提供了马里奥的皮肤下载,我制作中选用了白色的模板,让宝宝们怎么涂上颜色。

四、电路原理图
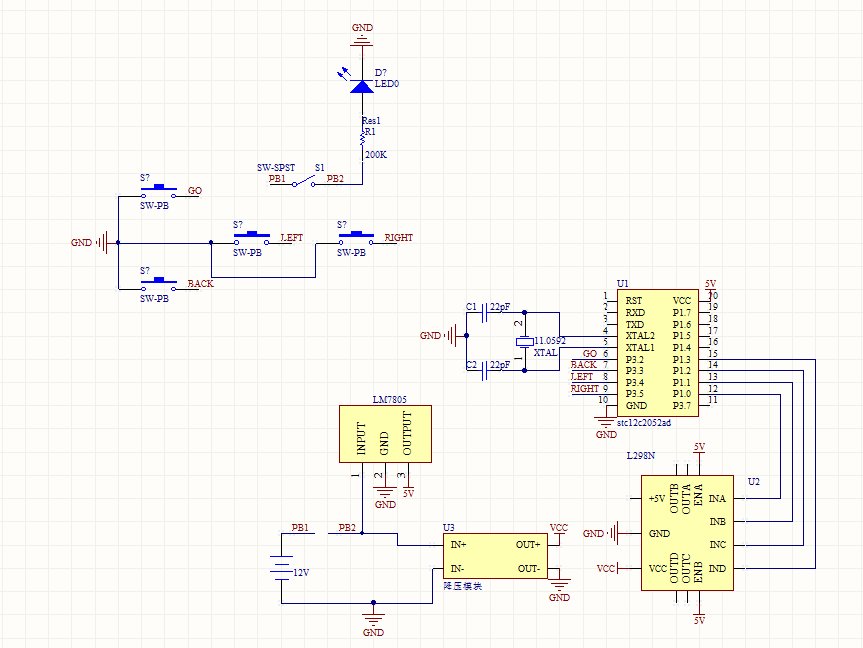
按照上面的原理图,进行电路焊接,实物如下图:

这里要特别注意的是,电路中用到的万能板的大小一定要剪裁到刚好可以放到两轮之间的大小,具体要先做好组装中的第一步,然后实际量一下尺寸,这样做出来比较美观。L298N和电池可以直接放在电路板上面,因为上方的空间比较大。
五、程序原代码
//转载请注明:@小五义http://www.cnblogs.com/xiaowuyi QQ群:64770604 #include<stc12c2052ad.h> #define uint unsigned int sbit A1=P1^0;// 输出1 sbit A2=P1^1;// 输出2 sbit B1=P1^2;//输出3 sbit B2=P1^3;//输出4 sbit find1=P3^2;//go sbit find2=P3^3;//back sbit find3=P3^4;//left sbit find4=P3^5;//right void delay_1ms(uint x) { uint y,z; for(y=0;y<x;y++) for(z=0;z<850;z++) ; } void go() { A1=0; A2=1; B1=0; B2=1; } void back() { A1=1; A2=0; B1=1; B2=0; } void left() { A1=1; A2=0; B1=0; B2=1; } void right() { A1=0; A2=1; B1=1; B2=0; } void find() { P3=0xff; if(find1==0) go(); if(find2==0) back(); if(find3==0) left(); if(find4==0) right(); if(find1==1&&find2==1&&find3==1&&find4==1) P1=0x00; } void main() { while(1) { find(); } } c51的代码如何烧写,这里就不讲了,不会的同学可以自己网上查一下,很简单。
完整代码包下载:https://yunpan.cn/crI8w94cIWTZ3 访问密码 3754
正文到此结束
热门推荐










相关文章






Loading...
![[HBLOG]公众号](https://www.liuhaihua.cn/img/qrcode_gzh.jpg)

