强化学习系列之五:进入实际问题的关键——价值函数近似
目前,我们已经介绍了一些强化学习的算法,但是我们无法在实际问题中运用这些算法。为什么呢?因为算法估算价值函数 
 ,保存这些价值函数意味着保存所有状态。而实际问题中,状态的数目非常巨大,遍历一遍的事情就别想了。比如,围棋的状态总数是
,保存这些价值函数意味着保存所有状态。而实际问题中,状态的数目非常巨大,遍历一遍的事情就别想了。比如,围棋的状态总数是  ,听说比宇宙的总原子数还多,23333。解决这个问题的方法是抽特征。对于一个状态 s, 我们抽取一些特征
,听说比宇宙的总原子数还多,23333。解决这个问题的方法是抽特征。对于一个状态 s, 我们抽取一些特征  ,将这些特征代替状态作为价值函数的输入,即
,将这些特征代替状态作为价值函数的输入,即 
或者
。这种方法我们称之为价值函数近似。价值函数近似解决了海量状态之后,我们才能实用强化学习算法。
文章目录
1. 参数化和目标
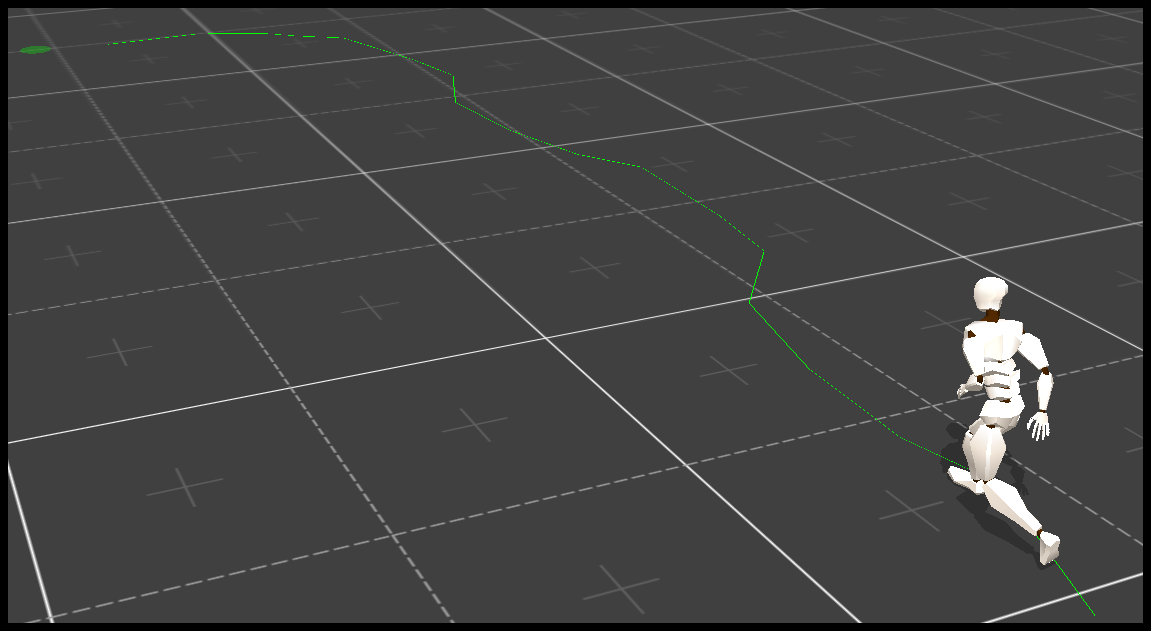
我们又要以机器人找金币为场景介绍价值函数近似。机器人从任意一个状态出发寻找金币,找到金币则获得奖励 1,碰到海盗则损失 1。找到金币或者碰到海盗,机器人都停止。衰减因子 
设为 0.8。
机器人找金币只有 9 个状态,但为了介绍价值函数近似,我们就假装状态非常多。我们以四个方向是否有墙作为状态特征,比如状态 1 的特征为 
, 分别表示北 (东、南、西) 方向有 (没有、没有、有) 墙。状态太多的情况下,模型无关的强化学习算法比较有用。模型无关的强化学习算法的工作对象是 (有状态特征之后为  ), 因此只有状态的特征是不够的。为此我们设定
), 因此只有状态的特征是不够的。为此我们设定  特征向量一共分为 |A| 部分,分别对应不同的动作。在 特征向量, a 动作部分放上
特征向量一共分为 |A| 部分,分别对应不同的动作。在 特征向量, a 动作部分放上  特征,其他动作部分全部置为 0。比如机器人找金币场景,状态 1 采取向北动作的特征向量
特征,其他动作部分全部置为 0。比如机器人找金币场景,状态 1 采取向北动作的特征向量  如下。
如下。
/begin{eqnarray}
/pmb{f(1,'n')} = [/underbrace{1, 0, 0, 1,}_{a='n'} /underbrace{0, 0 , 0 , 0,}_{a='e'} /underbrace{0, 0 , 0 , 0,}_{a='s'} /underbrace{0, 0 , 0 , 0}_{a='w'}]^{T} /nonumber
/end{eqnarray}
搞出特征来了,接下来就用参数计算价值了。我们设定参数向量  ,然后用特征向量和权重向量的内积估计状态-动作价值。
,然后用特征向量和权重向量的内积估计状态-动作价值。
/begin{eqnarray}
q(/hat{s},a) = /pmb{f(/hat{s},a)}^{T} /pmb{w} /nonumber
/end{eqnarray}
这时强化学习其实就是学习参数
的值,使得参数化的 q 值 尽量接近最优策略的 q 值  ,优化目标如下所示。
,优化目标如下所示。
/begin{eqnarray}
J(/pmb{w}) = min /sum_{s /in S, a /in A}/{ q(/hat{s},a) - q^{*}(s,a)/}^2 /nonumber
/end{eqnarray}
我们用梯度下降法求解这个优化目标。梯度下降法首先要计算梯度  。直接求导可得梯度。
。直接求导可得梯度。
/begin{eqnarray}
/frac{/partial J}{/partial /pmb{w}} &=& /sum_{s /in S, a /in A}/{ q(/hat{s},a) - q^{*}(s,a) /}/pmb{f(/hat{s},a)} /nonumber
/end{eqnarray}
但是状态很多,我们不可能真的按照上面的公式计算梯度 (上面的公式得遍历所有的状态)。实际的方法是让系统探索环境,遇到状态特征 和采取动作 a, 计算梯度然后更新参数。这个类似随机梯度下降。
/begin{eqnarray}
/frac{/partial J}{/partial /pmb{w}}_{/hat{s},a} &=& /{ q(/hat{s},a) - q^{*}(s,a) /}/pmb{f(/hat{s},a)} /nonumber //
/Delta /pmb{w} &=& -/alpha /frac{/partial J}{/partial /pmb{w}}_{/hat{s},a} /nonumber
/end{eqnarray}
参数更新的代码如下所示。
#qfunc 是最优策略的 q 值 #alpha 是学习率 def update(policy, f, a, qfunc, alpha): pvalue = policy.qfunc(f, a); error = pvalue - tvalue; fea = policy.get_fea_vec(f, a); policy.theta -= alpha * error * fea;
2. 强化学习算法
看了上面,你可以会问。计算 
 为最优策略的 q 值,让状态-动作价值 q(s,a) 尽量接近。SARSA 认为
为最优策略的 q 值,让状态-动作价值 q(s,a) 尽量接近。SARSA 认为 
为最优策略的 q 值,Q Learning 认为

。
/begin{eqnarray}
qfunc&=&g_t /quad &MC Control /nonumber //
qfunc&=&r+/gamma q(/hat{s},a) /quad &SARSA /nonumber //
qfunc&=&r+argmax_{a'}/{/gamma q(/hat{s}',a')/} /quad &Q Learning /nonumber
/end{eqnarray}
有了这些想法,我们只需要简单地改变下强化学习算法的更新部分,就可以引入价值函数近似了。新的更新规则是将算法认为的最优策略的 q 值输入参数更新模块。觉个例子,价值函数近似之后的 Q Learning 算法代码如下所示。
def qlearning(grid, policy, num_iter1, alpha): actions = grid.actions; gamma = grid.gamma; for i in xrange(len(policy.theta)): policy.theta[i] = 0.1 for iter1 in xrange(num_iter1): f = grid.start(); #从一个随机非终止状态开始, f 是该状态的特征 a = actions[int(random.random() * len(actions))] t = False count = 0 while False == t and count < 100: t,f1,r = grid.receive(a) #t 表示是否进入终止状态 #f1 是环境接受到动作 a 之后转移到的状态的特征。 #r 表示奖励 qmax = -1.0 for a1 in actions: pvalue = policy.qfunc(f1, a1); if qmax < pvalue: qmax = pvalue; update(policy, f, a, r + gamma * qmax, alpha); f = f1 a = policy.epsilon_greedy(f) count += 1 return policy;
3. 做个实验
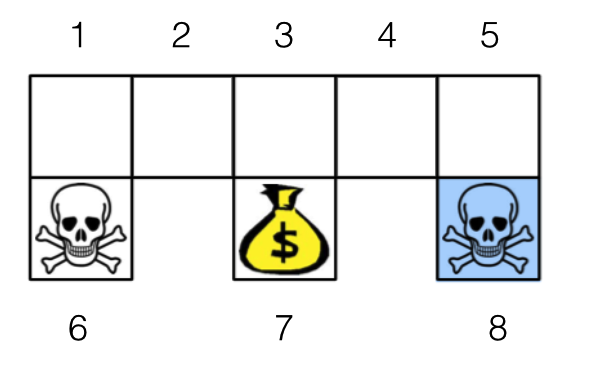
我们用机器人找金币做个实验吧。实验中,我们用了两种特征。一种特征是强特征,也就是上述四个方向是否有墙特征。另一种特征是 id 特征,特征向量长度为状态个数,第 i 个状态的特征向量的第 i 位为 1,其他位置为 0。实验对比了三种算法: MC Control, SARSA 和 Q Learning。 

设为 0.2, 学习率

设为 0.001。和上文一样,算法计算得到的状态(特征)-动作价值和最优策略的状态-动作价值之间的平方差,当做评价指标。实验的结果如下图所示。
这个实验结果告诉我们的第一件事就是选好特征。墙特征比 id 特征差。状态2 和 4 都是南北方向有墙,墙特征是一样的,会造成混淆。id 特征就没有这个问题。表现在实验结果上,MC Control 和 SARSA 在墙特征上都不停震荡,同时三种算法在墙特征的表现都不如其在 id 特征上的表现。
Q Learning 一如既往地表现出优越的效果。在墙特征上, Q Learning 不仅没有像 MC Control 和 SARSA 一样震荡,而且效果远远好于它们两者。在 id 特征上, Q Learning 完美拟合了最优策略的状态-动作价值。
4. 总结
实际问题中,状态的数目非常多,因此基于状态-动作价值的强化学习算法不适用。为了解决这个问题,人们提出了价值函数近似的方法。价值函数近似用特征表示状态或者状态-动作,用参数向量计算价值。价值近似之后,我们才算能把强化学习算法应用在实际问题上。本文代码可以在 Github 上找到,欢迎有兴趣的同学帮我挑挑毛病。强化学习系列的下一篇文章将介绍基于梯度的强化学习。
文章结尾欢迎关注我的公众号 AlgorithmDog,每周日的更新就会有提醒哦~
强化学习系列系列文章
- 强化学习系列之一:马尔科夫决策过程
- 强化学习系列之二:模型相关的强化学习
- 强化学习系列之三:模型无关的策略评价
- 强化学习系列之四:模型无关的策略学习
- 强化学习系列之五:价值函数近似
正文到此结束
热门推荐










相关文章






Loading...
![[HBLOG]公众号](https://www.liuhaihua.cn/img/qrcode_gzh.jpg)

