数组和矩阵 3 - 特殊矩阵
继续是《数据结构算法与应用:C++语言描述》,第四章数组和矩阵的笔记。本小节介绍几种特殊矩阵的内容。
定义和应用
方阵是指具有相同行数和列数的矩阵。
一些常用的特殊方阵如下:
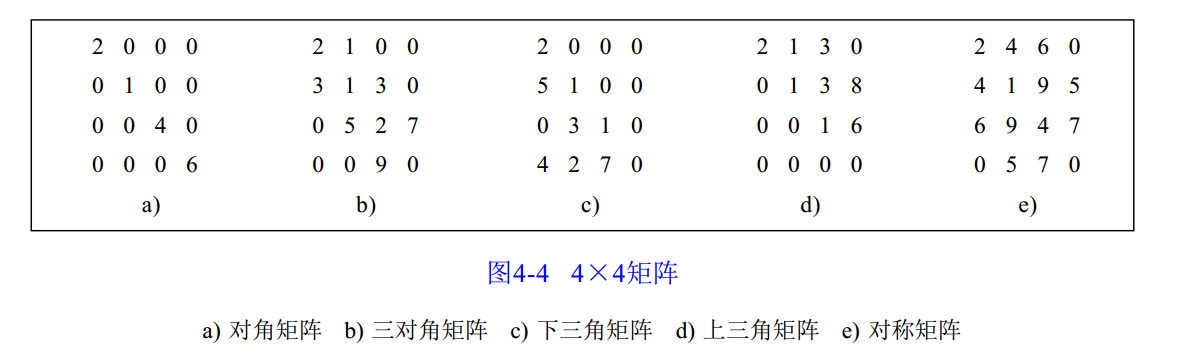
- 对角矩阵 $M$是一个对角矩阵,当前仅当$i /neq j$时,有$M(i,j)=0$。如下图a所示
- 三对角矩阵 $M$是一个三对角矩阵,当前仅当$|i-j| /gt 1$时有$M(i,j)=0$。如下图b所示
- 下三角矩阵 $M$是一个下三角矩阵,当前仅当$i/lt j$时有$M(i,j)=0$。如下图c所示
- 上三角矩阵 $M$是一个上三角矩阵,当前仅当$i/gt j$时有$M(i,j)=0$。如下图d所示
- 对称矩阵 $M$是一个对称矩阵,当前仅当对于所有的$i 和 j$有$M(i,j)=M(j,i)$。如下图e所示
对角矩阵
可以采用 T d[n][n] 这样的二维数组来描述一个元素类型为T的$n /times n$对角矩阵D。
使用数组元素 d[i-1][j-1] 来表示矩阵元素 D(i,j) ,这种描述形式所需要的存储空间为$n^2 * sizeof(T)$。
由于一个对角矩阵最大包含n个非0元素,所以可以采用 T d[n] 一维数组来描述对角矩阵。其中使用 d[i-1] 表示矩阵元素 D(i,i) ,而根据对角矩阵的定义,所有未在一维数组中出现的矩阵元素均为0.
这里使用如下自定义类 DiagonalMatrix 来实现这种描述。
#ifndef DIAGONALMATRIX_H_ #define DIAGONALMATRIX_H_ template<class T> class DiagonalMatrix{ private: // 矩阵维数 int n; // 存储对角元素的一维数组 T *d; public: DiagonalMatrix(int size = 10): n(size){ d = new T[n]; } ~DiagonalMatrix(){ delete[] d; } DiagonalMatrix<T>& Store(const T& x, int i, int j); T Retrieve(int i, int j)const; }; template<class T> DiagonalMatrix<T>& DiagonalMatrix<T>::Store(const T&x, int i, int j){ // 将x存为D(i,j) if (i<1 || j<1 || i>n || j>n) throw OutOfBounds(); if (i != j && x != 0) // 必须满足对角矩阵的条件:i != j 时,x必须为0 throw MustBeZero(); if (i == j) d[i - 1] = x; return *this; } template<class T> T DiagonalMatrix<T>::Retrieve(int i, int j)const{ if (i<1 || j<1 || i>n || j>n) throw OutOfBounds(); if (i == j) return d[i - 1]; return 0; } #endif
对于存储和搜索操作,提供了两个不同的函数,而不是使用重载操作符()来完成。此外在存储一个值时,必须保证不会在非对角线位置放置一个非0值;而搜索一个值时,没有必要检查对角线以外的值,因此有必要对这两种情形区别对待。两个函数的复杂性均为$/theta(1)$。
三对角矩阵
在一个$n /times n$三对角矩阵T中,非0元素排列在如下的三条对角线上:
- 主对角线—— i=j
- 主对角线之下的对角线(称低对角线)—— i=j+1
- 主对角线之上的对角线(称高对角线)—— i=j-1
这三条对角线上的元素总数为 3n-2 ,故可以使用一个拥有3n-2个位置的一维数组来描述T。考察上述图b中所示的$4/times 4$三对角矩阵,三条对角线上总共10个元素。如果将其逐行映射到一维数组t中,则有 t[0:9]=[2,1,3,1,3,5,2,7,9,0] ;如果逐列映射到t中,则有 t=[2,3,1,1,5,3,2,9,7,0] ;如果按照对角线的次序,从最下面的对角线开始进行映射,则有 t=[3,5,9,2,1,2,0,1,3,7] 。所以这里有三种不同的方式来进行T到t的映射。
下面的程序定义了类 TridiagonalMatrix ,其中采用了对角线映射方式。
template<class T> class TridiagonalMatrix{ private: int n; T *t; public: TridiagonalMatrix(int size = 10) : n(size){ t = new T[3 * n - 2]; } ~TridiagonalMatrix(){delete[] t;} TridiagonalMatrix<T>& Store(const T& x, int i, int j); T Retrieve(int i, int j)const; }; template<class T> TridiagonalMatrix<T>& TridiagonalMatrix<T>::Store(const T& x, int i, int j){ // 把x存为T(i,j) if (i<1 || j<1 || i>n || j>n) throw OutOfBounds(); switch (i-j){ case 1: // 低对角线 t[i - 2] = x; break; case 0: // 主对角线 t[n - 2 + i] = x; break; case -1: // 高对角线 t[2 * n - 2 + i] = x; break; default: if (x != 0) throw MustBeZero(); } return *this; } template<class T> T TridiagonalMatrix<T>::Retrieve(int i, int j)const{ if (i<1 || j<1 || i>n || j>n) throw OutOfBounds(); switch (i - j){ case 1: // 低对角线 return t[i - 2]; case 0: // 主对角线 return t[n - 2 + i]; case -1: // 高对角线 return t[2 * n - 2 + i]; default: return 0; } }
这里首先是从最下面的对角线开始,也就是低对角线,那么T(i,j)对应的一维数组是t[i-2],接着轮到主对角线的时候,只需要用i加上低对角线的元素总数,即n-2个,也就是对应数组t[n-2+i],因为i是依次从1,按行逐渐增加;最后对于高对角线,也是同样的计算方法。
三角矩阵
在三角矩阵中,无论是上三角还是下三角矩阵,非0元素总数均为$/frac{n(n+1)}{2}$。
两种三角矩阵都可以用一个大小为$/frac{n(n+1)}{2}$的一维数组进行描述。考虑把一个下三角矩阵映射到一个一维数组$l$,可以采用按行和按列两种不同的方式进行映射。如果按行映射,上图c中$4/times 4$下三角矩阵可以得到$l[0:9] = (2,5,1,0,3,1,4,2,7,0)$;若按列的方式,得到$l[0:9] =(2,5,0,4,1,3,2,1,7,0)$。
所以对于下三角矩阵中的一个元素$L(i,j)$,如果$i/lt j$,则$L(i,j)=0$;如果$i/le j$,则$L(i,j)$位于非0元素区域,且其对应的一维数组是 t[$/frac{i(i-1)}{2}+j-1$] ,其映射规则是先统计前i-1行的非0元素数量然后加上当前元素所在第i行的所在列数j-1。下面给出自定义类 LowerMatrix 实现下三角矩阵,并且是按行来映射。
template<class T> class LowerMatrix{ private: // 矩阵维数 int n; // 存储对角元素的一维数组 T *t; public: LowerMatrix(int size = 10) : n(size){ t = new T[n*(n+1)/2]; } ~LowerMatrix(){ delete[] t; } LowerMatrix<T>& Store(const T& x, int i, int j); T Retrieve(int i, int j)const; }; template<class T> LowerMatrix<T>& LowerMatrix<T>::Store(const T&x, int i, int j){ // 将x存为D(i,j) if (i<1 || j<1 || i>n || j>n) throw OutOfBounds(); // 当前仅当 i >= j时,(i,j)位于下三角 if (i >= j) t[i*(i - 1) / 2 + j - 1] = x; else if (x != 0) throw MustBeZero(); return *this; } template<class T> T LowerMatrix<T>::Retrieve(int i, int j)const{ if (i<1 || j<1 || i>n || j>n) throw OutOfBounds(); if (i >= j) return t[i*(i - 1) / 2 + j - 1]; else return 0; }
上三角矩阵的实现方式也是相同的,只需要改变判断条件,将$i /ge j$变成$i /le j$即可。
对称矩阵
一个$n/times n$的对称矩阵可以用一个大小为$/frac{n(n+1)}{2}$的一维数组来描述,可参考三角矩阵的存储模式来存储矩阵的上三角或下三角,即可以根据已经存储的元素来推算出未存储的元素。即如果存储下三角的元素,当需要给出在上三角的元素,只需要将行和列对调,再来搜索即可得到需要的元素值,这样做可以更节省空间。
小结
本小节主要是介绍几种特殊矩阵,都是属于方阵,分别是三角矩阵,三对角矩阵,上三角和下三角矩阵以及对称矩阵,并且都自定义类来实现这几种特殊的矩阵。
更完整的例子可以查看我的 Github
正文到此结束
热门推荐










相关文章






Loading...
![[HBLOG]公众号](https://www.liuhaihua.cn/img/qrcode_gzh.jpg)

