NIPS 2016精华大盘点丨吴恩达、LeCun等大师的论文、PPT都在这儿,别劳心去找了
2016 NIPS 仍在如火如荼地进行,各位大佬也频繁在会场露面,并时不时的搞个“大新闻”。雷锋网时刻关注着 NIPS 的一切动态,并把大家较为关注的论文以及学术大师的PPT整理出来,方便大家学习和参考。
先打个招呼,正文和文末都有彩蛋。
Yann LeCun

Yann LeCun 最近可谓是学术界的网红,上周先后录了三段视频为大家普及人工智能知识,现在又飞到西班牙见见粉丝,也不忘随时更新下 Facebook。
Yann LeCun 受邀在今年的 NIPS 大会发表演讲。众所周知,深度学习通常分类为:无监督学习、监督学习和增强学习,而 Yann LeCun 在演讲中用“预测学习”替代“无监督学习”。他指出因为预测学习要求机器不仅能在没有人类监督的情况下进行学习,同时能够学习世界的预测模型。
演讲结束后 ,Yann LeCun 做了个总结:
1. 如果有很多标签的数据,监督学习会运行的很好。
2. 但是如果我们想让机器观察世界并如何获取"常识",上面提到的那一点是远远不够的。
3. 唯一能让机器获得常识的方法就是让它像人和动物一样观察世界。
4. 要变得更聪明,机器需要学习世界的预测模型。
5. 实体RNN是一种新模型,从对事件的文本描述中,对世界的状态作出估测。
6. 这是唯一一个能解决20个任务,并且精确度还不错地模型。
7. 通过演示(完成)动作序列进行学习,并在不影响真实世界的情况下模拟出结果。
8. 但他们也需要一个目标导向的学习方式,同时也需要基于模型的增强学习.
9. 预测学习可以在一个以能源为基础的框架内制定,在不确定的情况下开始学习。
10. 在不确定的情况下学习,最有效的办法是对抗训练。
11. 以能源为基础的生成式对抗网络可以合成高分辨率图像。
12. 对抗训练能够训练视频预测系统,并将"模糊预测"的问题列入最小二乘法问题。
看到这里,你一定想仔细瞅瞅 Yann LeCun 的 75 页 PPT 吧?
关注雷锋网 (公众号:雷锋网) 旗下的人工智能垂直微信公众号【AI科技评论】,在公众号后台回复关键词“大师”,获取PPT。
Yoshua Bengio 得意门生:Ian Goodfellow

近日,Open AI 科学家 Ian Goodfellow 在 NIPS 2016 大会上分享了生成式对抗网络的研究成果,
Ian Goodfellow 是何许人也,现为 Open AI 科学家,此前为谷歌大脑团队高级研究员,大学期间师从 Yoshua Bengio 大神。生成式对抗网络这个词就是他发明的,而且对机器学习领域的研究影响重大。
那么就来听听“生成式对抗网络之父”讲讲生成式对抗网络。
送个菜单,这是 Yoshua Bengio 刚刚在 FB 上发的照片,师徒相聚,画面感人。
NIPS大会现场:最左为 Yoshua Bengio,最右为 Ian Goodfellow
那么接下来言归正传:
我们知道,机器学习方法可以分为生成方法(generative approach)和判别方法(discriminative approach),所学到的模型分别称为生成式模型(generative model)和判别式模型(discriminative model)。其中近两年来流行的生成式模型主要分为三种方法:
-
生成对抗网络(GAN:Generative Adversarial Networks)
-
变分自编码器(VAE: Variational Autoencoders)
-
自回归模型(Autoregressive models)
小编为大家提供的 PPT 内容着重讲生成对抗网络(GAN:Generative Adversarial Networks),总共 86 页。
关注微信公众账号【AI科技评论】,在微信公众号后台回复关键词“大神”,获取PPT。
吴恩达
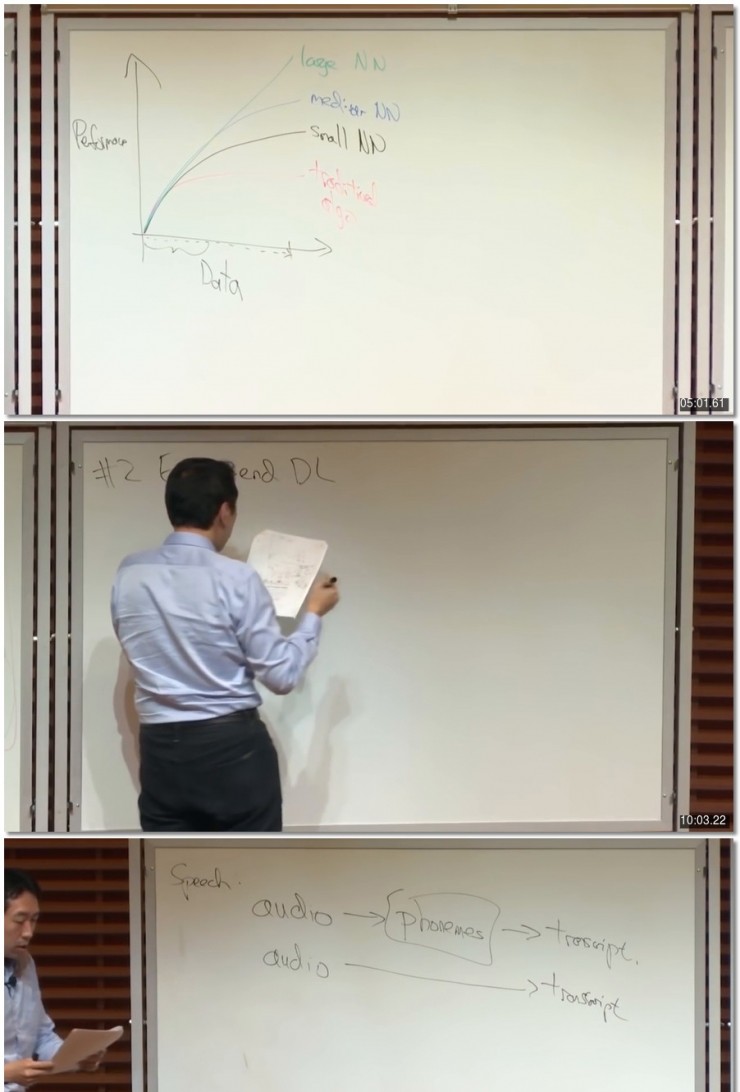
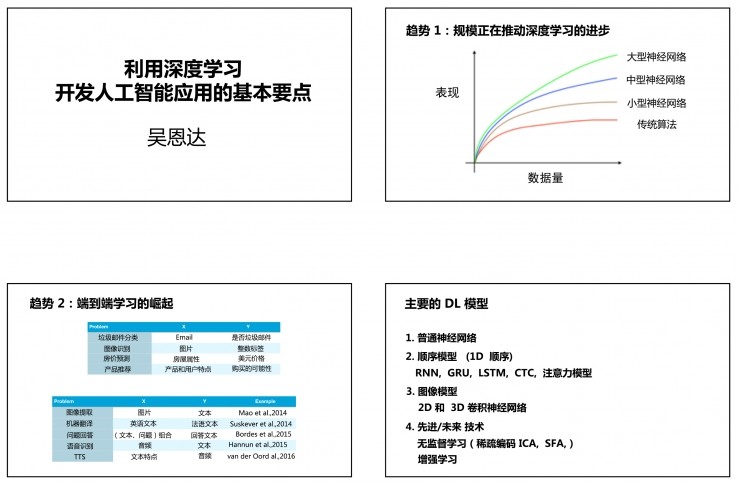
昨日在吴恩达教授在 NIPS 上发表演讲:《利用深度学习开发人工智能应用的基本要点(Nuts and Bolts of Building Applications using Deep Learning)》。
吴恩达在现场用黑笔白笔写的板书,已被小编做成了中文版 PPT,就是这么走心。
整理后的:
关注微信公众账号【AI科技评论】,在微信公众号后台回复关键词“吴恩达大礼包”,获取PPT。
2016NIPS 有趣、有料的论文视频 8 个

本文作者魏秀参,雷锋网已获得这部分内容的引用授权。
前几天 NIPS官网开放了部分录用文章的 Spotlight Videos(链接:https://nips.cc/Conferences/2016/SpotlightVideos),为学术达人魏秀参童鞋把所有论文都捋了一遍,特地将一些有趣、有料的内容整理出来分享给大家。文章链接均为YouTube 视频。
一、Fast and Provably Good Seedings for k-Means:传统k-Means算法受初始化影响较大,虽然后来有k-Means++算法来优化初始化结果,但该算法不能适用于海量数据。本文提出了一种新的更优且高效的针对k-Means初始化方法(oral paper)
链接:https://www.youtube.com/watch?v=QtQyeka-tlQ&feature=youtu.be
二、Hierarchical Question-Image Co-Attention for Visual Question Answering:针对VQA提出不仅要在image domain需要attention,同时为了增加鲁棒性还需在question domain同样加入attention;
链接:https://www.youtube.com/watch?v=m6t9IFdk0ms&feature=youtu.be
三、Residual Networks Behave Like Ensembles of Relatively Shallow Networks:实验角度探究了ResNet,提出ResNet更像很多小网络的集成。比较有意思的paper;
链接:https://www.youtube.com/watch?v=jFJF5hXuo0s
四、Stochastic Multiple Choice Learning for Training Diverse Deep Ensembles:多个深度模型集成算法;
链接:www.youtube.com/watch%3Fv%3DKjUfMtZjyfg%26feature%3Dyoutu.be
五、Active Learning from Imperfect Labelers:提出一种adaptive算法以处理主动学习中labeler不不确定的情况;
链接:https://www.youtube.com/watch?v=zslooZuNNIk&feature=youtu.be
六、Improved dropout for shallow deep learning:提出一种改进版本dropout
链接:https://www.youtube.com/watch?v=oZOOfaT94iU&feature=youtu.be
七、Convolutional Neural Fabrics:抽象化CNN,学习网络结构
链接:https://www.youtube.com/watch?v=bqPJFQEykbQ
八、Tagger: Deep Unsupervised Perceptual Grouping很有料的文章,另外视频很赞,建议授予“最佳视频奖”:)
链接:https://www.youtube.com/watch?v=jfB_lWZA4Qo&feature=youtu.be
Google 12 篇精选论文
获取方式:关注微信公众账号【AI科技评论】,在后台回复关键词“谷歌大礼包”获取 12 篇论文的 PDF
看完 PPT 和视频,现在就得来点儿略生涩的硬货了,Google 的重量级论文来袭,其中也有论文是 Geoffrey Hinton 写的哦。
-
Community Detection on Evolving Graphs
作者:Stefano Leonardi, Aris Anagnostopoulos, Jakub Łącki, Silvio Lattanzi, Mohammad Mahdian
-
Linear Relaxations for Finding Diverse Elements in Metric Spaces
作者:Aditya Bhaskara, Mehrdad Ghadiri, Vahab Mirrokni, Ola Svensson
-
Nearly Isometric Embedding by Relaxation
作者:James McQueen, Marina Meila, Dominique Joncas
-
Optimistic Bandit Convex Optimization
作者:Mehryar Mohri, Scott Yang
-
Reward Augmented Maximum Likelihood for Neural Structured Prediction
作者:Mohammad Norouzi, Samy Bengio, Zhifeng Chen, Navdeep Jaitly, Mike Schuster, Yonghui Wu, Dale Schuurmans
-
Stochastic Gradient MCMC with Stale Gradients
作者:Changyou Chen, Nan Ding, Chunyuan Li, Yizhe Zhang, Lawrence Carin
-
Unsupervised Learning for Physical Interaction through Video Prediction
作者:Chelsea Finn*, Ian Goodfellow, Sergey Levine
-
Using Fast Weights to Attend to the Recent Past
作者:Jimmy Ba, Geoffrey Hinton, Volodymyr Mnih, Joel Leibo, Catalin Ionescu
-
A Credit Assignment Compiler for Joint Prediction
作者:Kai-Wei Chang, He He, Stephane Ross, Hal III
-
A Neural Transducer
作者:Navdeep Jaitly, Quoc Le, Oriol Vinyals, Ilya Sutskever, David Sussillo, Samy Bengio
-
Attend, Infer, Repeat: Fast Scene Understanding with Generative Models
作者:S. M. Ali Eslami, Nicolas Heess, Theophane Weber, Yuval Tassa, David Szepesvari, Koray Kavukcuoglu, Geoffrey Hinton
-
Bi-Objective Online Matching and Submodular Allocations
作者:Hossein Esfandiari, Nitish Korula, Vahab Mirrokni
DeepMind 论文精选
获取方式:关注微信公众账号【AI科技评论】,在微信公众号后台回复关键词“DeepMind大礼包”,获取下面部分论文PDF
Google 的论文要是没看够的话,那就继续瞅瞅 DeepMind 的论文。
DeepMind 在其博客上更新了文章《DeepMind Papers @ NIPS 》,介绍了其在 NIPS 2016 上发表的一部分论文。
一、用于学习物体、关系和物理学的交互网络( Interaction Networks for Learning about Objects, Relations and Physics)
作者:Peter Battaglia, Razvan Pascanu, Matthew Lai, Danilo Rezende, Koray Kavukcuoglu
论文链接: https://arxiv.org/abs/1605.07571
概述:在此介绍交互网络(interaction networks),交互网络可以推理复杂系统中物体的交互,支持动态预测,以及推理该系统的抽象属性。交互网络结合了三种强大的方法:结构化模型(structured model)、模拟(simulation)和深度学习。它们能够输入图结构化的数据(graph-structured data),以一种类似于模拟的方式执行以物体或关系为中心的推理,并可通过使用深度神经网络来实现。它们不会根据这些实体和关系的排列而改变,可自动泛化到与它们训练时的结构不同和大小规模的系统中。
二、用于学习宏动作的 STRAW 模型(Strategic Attentive Writer for Learning Macro-Actions)
作者:Alexander (Sasha) Vezhnevets, Volodymyr Mnih, Simon Osindero, Alex Graves, Oriol Vinyals, John Agapiou, Koray Kavukcuoglu
论文视频: https://www.youtube.com/watch?v=niMOdSu3yio
摘要:我们提出一个新的深度循环神经网络架构,它可以在一个强化学习场景中,通过与某个环境互动来以端到端的方式学习构建隐含的规划。该网络构建了一个内部规划,它会根据对来自环境中的下一个输入的观察进行持续地更新。此外,它也可以通过学习根据规划实现所要的时长来将这个内部表征分区成连续的子序列,不需要重新做计划。
三、 用于 One Shot 学习的 Matching Network (Matching Networks for One Shot Learning)
作者:Oriol Vinyals, Charles Blundell, Timothy Lillicrap, Koray Kavukcuoglu, Daan Wierstra
链接:https://arxiv.org/abs/1606.04080
摘要:给定一个样本很少甚至只有一个样本的看不见分类中,可以使用 Matching Networks 在 ImageNet 上达到较高的分类精度。该核心架构训练起来较为简单,与此同时,它在一系列图像和文本分类任务上的表现极好。Matching Network 可按照其测试的方式训练:呈现一系列瞬时性的 one shot 学习训练任务,其中训练样本的每一个实例都要并行投入该网络中。然后训练 Matching Network 来正确对很多不同输入训练集进行分类。效果是要训练一个网络,它可以跳过梯度下降的步骤,在一个全新的数据集上分类。
四、安全有效的离策略强化学习(Safe and efficient off-policy reinforcement learning)
作者:Remi Munos, Tom Stepleton, Anna Harutyunyan, Marc G. Bellemare
论文链接:https://arxiv.org/abs/1606.02647
我们的目标是设计出带有两个所需特性的强化学习算法。首先,要使用离策略数据(off-policy data),当我们使用记忆再现(memory replay,即观察日志数据)时它对探索很重要。其次,要使用多步骤返回(multi-steps returns)以便更快地传递反馈和避免近似/估计误差(approximation/estimation errors)的积累。这两个属性在深度强化学习中是至关重要的。
五、 样本高效的蒙特卡洛规划(Blazing the trails before beating thePath: Sample efficient Monte-Carlo planning)
作者:Jean-Bastien Grill (INRIA), Michal Valko (INRIA), Remi Munos
PDF链接:https://papers.nips.cc/paper/6253-blazing-the-trails-before-beating-the-path-sample-efficient-monte-carlo-planning.pdf
假如有一台依照马尔科夫决策过程(MDP)运转的机器人,它有有限或无限次数的状态-动作到下一个状态的转换。机器人需要在执行任务前进行一系列规划。现在,为了进行计划,机器人配备了一个生成模型来进行蒙特卡洛规划。为了感知世界,机器人需要进行高效的规划,也就是说要样本高效(sample-efficient)——通过仅探索可使用的一个状态子集来利用 MDP 的可能结构,这些探索遵循近最优策略(near-optimal policies)。你需要保证样本复杂性,这取决于接近最优状态数量的度量。你想要的是对问题的蒙特卡洛采样(用于估计期望)的扩展,该采样可以交替最大化(在动作上)和期望(在下一个状态上)。你需要一个简单的实现和足够的计算效率。我们提出了 TrailBlazer 来解决此类需求。
六、通过 Bootstrapped DQN 的深度探索(Deep Exploration via Bootstrapped DQN)
作者:Ian Osband, Charles Blundell, Alex Pritzel and Benjamin Van Roy
论文链接: https://papers.nips.cc/paper/6501-deep-exploration-via-bootstrapped-dqn
强化学习领域出现了很多突破,不过这些算法中很多都需要大量数据,之后才能学会做出好的决策。在许多真实环境中,我们无法获得如此大量的数据。
这些算法学习如此之慢的原因之一是它们并没有收集到用于学习该问题的正确数据。这些算法使用抖动(采取随机动作)来探索他们的环境——这种方法比起在多个时间步骤上对信息策略进行优先级排序的深度探索,效率指数级地更差。对于使用深度探索进行统计学上高效的强化学习已经有很多文献了,但问题是这些算法中没有一个是可以通过深度学习解决的,而现在我们有了。
这篇论文的关键突破如下:提出了第一个结合了深度学习与深度探索的实用强化学习算法:Bootstrapped DQN。
视频连接:https://www.youtube.com/playlist?list=PLdy8eRAW78uLDPNo1jRv8jdTx7aup1ujM
七、 带有随机层数的序贯神经模型(Sequential Neural Models with Stochastic Layers)
作者:Marco Fraccaro, Søren Kaae Sønderby, Ulrich Paquet, Ole Winther
论文链接:https://arxiv.org/abs/1605.07571
摘要:RNN 在捕获数据中的长期依赖性方面表现优异,而 SSM 可以对序列中的潜在随机结构中的不确定性进行建模,并且善于跟踪和控制。有没有可能将这两者的最好一面都集中到一起呢?在本论文中,我们将告诉你如何通过分层确定的(RNN)层和随机的(SSM)层去实现这个目标。我们将展示如何通过给定一个序列的过去(过滤)、以及它的过去和未来(平滑)的信息来有效地推理它当前的隐含结构。
八、通过梯度下降去学习通过梯度下降的学习(Learning to learn by gradient descent by gradient descent)
作者:Marcin Andrychowicz, Misha Denil, Sergio Gomez, Matthew Hoffman, David Pfau, Tom Schaul, Nando De Freitas
论文链接:https://arxiv.org/abs/1606.0447 (https://arxiv.org/abs/1606.04474)
摘要:我们展示了如何将优化算法的设计作为一个学习问题,允许算法学习以一种自动的方式在相关问题中探索结构。我们学习到的算法在已经被训练过的任务上的表现胜过了标准的人工设计的算法,并且也可以很好地推广到具有类似结构的新任务中。我们在一些任务上演示了这种方法,包括神经网络训练和使用神经艺术为图像赋予风格。
九、一个使用部分调节的在线序列到序列的模型(An Online Sequence-to-Sequence Model Using Partial Conditioning)
作者:Navdeep Jaitly, Quoc V. Le, Oriol Vinyals, Ilya Sutskever, David Sussillo, Samy Bengio
PDF链接:http://papers.nips.cc/paper/6594-an-online-sequence-to-sequence-model-using-partial-conditioning.pdf
摘要:由于从一个序列到另一个序列(序列到序列(seq2seq))的映射的模型的通用性比较优异,所以它们在过去两年变得非常流行,在翻译、字幕或者解析等一系列任务中达到了顶尖水准。这些模型的主要缺点是它们在开始产生结果输出序列「y」之前需要读取整个输入序列「x」。在我们的论文中,我们通过允许模型在整个输入序列被读取之前发出输出符号来规避这些限制。虽然这引入了一些独立假设,但也在语音识别或机器翻译等特定领域的在线决策中使得这些模型更加理想。
十、 通过时间的记忆有效的反向传播(Memory-Efficient Backpropagation through time)
作者:Audrunas Gruslys, Remi Munos, Ivo Danihelka, Marc Lanctot, Alex Graves
PDF链接:https://papers.nips.cc/paper/6220-memory-efficient-backpropagation-through-time.pdf
摘要:当训练卷积 RNN 时,特别容易耗尽昂贵的 GPU 储存器,并且储存器的限制经常导致网络大小的折损。用于缓解这个方法的常见方案之一是仅记忆一些中间神经元的激活,并且根据需要重新计算其他的激活。虽然存在许多的启发式方法来折中储存器和计算,但是它们中的大多数仅适用于某些边缘情况并且是次优的。我们将该问题视为一个动态规划问题,它允许我们找到一类收到内存限制的可证明最优策略。对于长度为 1000 的序列,我们的算法节省了 95% 的储存器使用,而每个学习步骤仅使用了比标准的 BPTT 多三分之一的时间。
十一、 实现概念压缩(Towards Conceptual Compression)
作者:Karol Gregor, Frederic Besse, Danilo Rezende, Ivo Danihelka, Daan Wierstra
PDF连接:http://papers.nips.cc/paper/6542-towards-conceptual-compression.pdf
摘要:发现高层面的抽象表征是无监督学习的主要目标之一。我们设计出一种架构解决这个问题,该架构可将存储在像素中的信息转换为携带表征的有序信息序列。训练根据顺序的紧急程度产生,其中早期表征携带了更多关于图像的全局和概念方面的信息,而后期的表征则对应于细节。该模型是一个完全卷积、序列的变分自动编码器,其设计灵感来自 DRAW。该架构简单且均匀,因此不需要许多的设计选择。
十二、图像 3D 结构的无监督学习(Unsupervised Learning of 3D Structure from Images)
作者: Danilo Rezende, Ali Eslami, Shakir Mohamed, Peter Battaglia, Max Jaderberg, Nicolas Heess
论文地址:https://arxiv.org/abs/1607.00662
摘要:想象你正在盯着一张椅子的照片。如果从不同的视角想象椅子的形状,你就能够准确地识别出这是椅子。做到这一点的关键不仅是要明确了解透视图、遮挡和图像信息处理,更重要的是要有“椅子该是什么样”这样的先验知识,这能让你“填充”图像中丢失的部分。在此论文中,我们研究了能够完成类似上述推理的模型,首次证明了以完全无监督的形式学习推论 3D 表征的可行性。
关注微信公众账号【AI科技评论】,在后台回复“终极大礼包”获取上面所有资料。
雷锋网原创文章,未经授权禁止转载。详情见 转载须知 。

正文到此结束
热门推荐










相关文章






Loading...
![[HBLOG]公众号](https://www.liuhaihua.cn/img/qrcode_gzh.jpg)

