基于深度学习的自动避障小车_2_架构设计
Introduction
本文从硬件架构和软件架构描述了整套系统的设计。
raspberrypi基于深度学习的自动避障智能小车_目录
1. 硬件结构
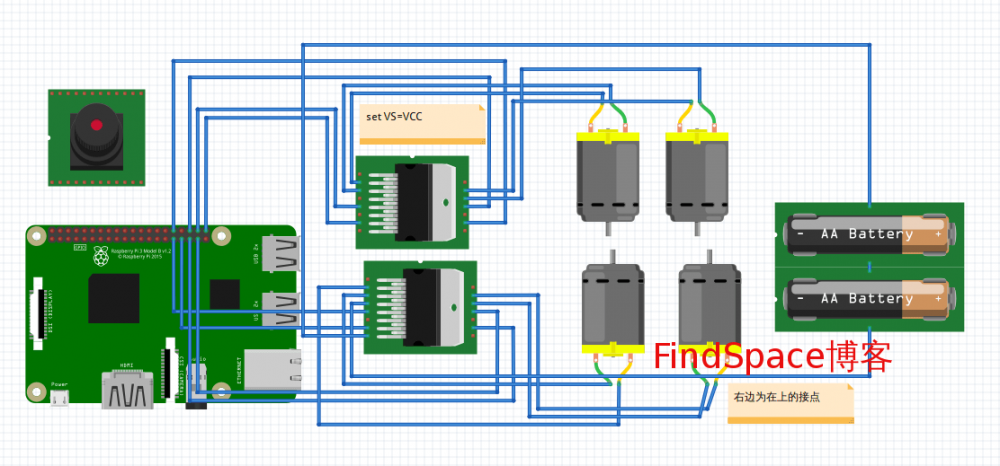
该图片采用fritzing绘制,fzz文件在 本项目的github 上有。
1.1 控制核心部件
树莓派3的参数
| 项目 | 部件 |
|---|---|
| SoC(系统芯片) | BCM2837 |
| CPU | ARM Cortex-A53 1.2GHz 四核 |
| GPU | Broadcom VideoCore IV, OpenGL ES 2.0, 1080p 30 h.264/MPEG-4 AVC 高清解码器 |
| 内存 | 1GB |
| USB 2.0 | 4 |
| 视频输出 | RCA视频接口输出(仅1代B型有此接口),支持PAL和NTSC制式,支持HDMI (1.3和1.4),分辨率为640 x 350 至 1920 x 1200 支持PAL 和NTSC制式。 |
| 音频输出 | 3.5mm 插孔(Zero无此项), HDMI(高清晰度多音频/视频接口) |
| SD卡 | Micro SD卡接口 |
| 网络接入 | 10/100 以太网接口(RJ45接口),支持WiFi和蓝牙。 |
| 扩展接口 | 40个 |
| 最大功率 | [email protected] |
| 电源输入 | 5v,通过MicroUSB或GPIO引脚 |
| 总体尺寸 | 85 x 56 x 17 mm |
| 操作系统 | Debian GNU/Linux |
1.2 视频信号采集硬件
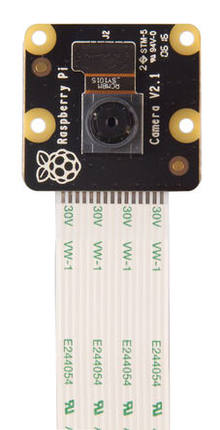
本文项目使用了CMOS材料的摄像头( CSI接口,非USB摄像头 ),像素都连接着 ADC,不用设计专属通道,也可以转为数字信号使用,像素体积较小,内部可以设置信号处理器,辅助寄存器可以用作缓存,且所需耗电量也少。数字摄像头采集的图像较为准确,可抗干扰,有利于 CMOS 摄像头在智能小车上的实时应用。
- 无 IR 滤波器
- 高清图像
- 高数据容量
- 8 百万像素固定焦点(包括.焦点调整工具)
- 支持 1080p、720p60 和 VGA90
- Sony IMX219PQ CMOS 图像传感器
- 15 引脚带状电缆
1.3 小车驱动部件
L298N电机驱动板模块

| 尺寸 | 长25.5CM*宽15CM(厚3MM) |
|---|---|
| 电压 | 电机工作电压3-6V |
| 减速比 | 1:48的双轴电机 |
| 电流 | 0.5-2A |
| 电机 | 180转/分 5V电压 |
2. 软件架构
2.1 修正后的需求
- 小车捕获摄像头数据
- PC接收视频图像数据
- PC处理图像数据分辨出目标物体和障碍物
- PC利用避障算法获得小车的执行指令
- 小车接收指令并执行
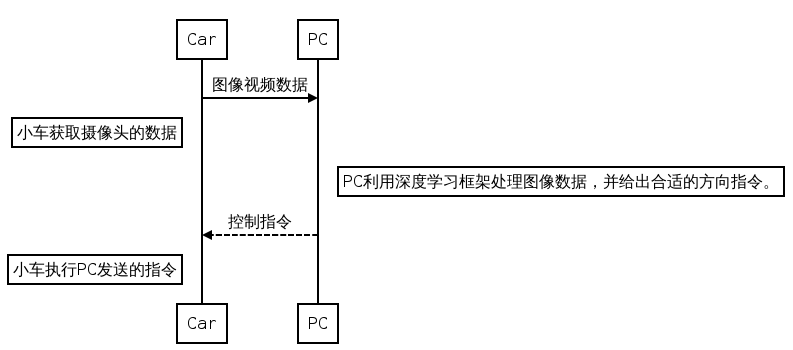
2.2 架构设计
小车上开启socket server,接收控制端发来的指令,也将图片发送给控制端。
PC上开启httpserver,方便随时随地查看小车摄像头的视频数据,由于motion自带了一个httpserver,可以通过嵌入frame的方式快速实现网页实时监控视频播放。
Car->PC: 图像视频数据 Note left of Car: 小车获取摄像头的数据 Note right of PC: PC利用深度学习框架处理图像数据,并给出合适的方向指令。 PC-->Car: 控制指令 Note left of Car: 小车执行PC发送的指令
正文到此结束
热门推荐










相关文章






Loading...
![[HBLOG]公众号](https://www.liuhaihua.cn/img/qrcode_gzh.jpg)

