如何训练深度神经网络?老司机的 15 点建议

本文为印度深度学习专家、创业者 Rishabh Shukla 在 GitHub 上发表的长博文,总结了他过去的开发经验,旨在给新入门的开发者提供指导。雷锋网做了不改变原意的编译。
在深度学习领域,为了高效训练深度神经网络,有些实践方法被过来人强烈推荐。
在这篇博文中,我会覆盖几种最常使用的实践方法,从高品质训练数据的重要性、超参数(hyperparameters)到更快创建 DNN(深度神经网络) 原型模型的一般性建议。 这些推荐方法中的大多数,已被学术界的研究所证实 ,并在论文中展示了相关实验、数学证据,比如 Efficient BackProp(Yann LeCun et al.) 和 Practical Recommendations for Deep Architectures(Yoshua Bengio) 。
1. 训练数据
许多 ML 开发者习惯把原始训练数据直接扔给 DNN——为什么不这么做呢?既然任何 DNN (大多数人的假设)仍然能够给出不错的结果,不是吗?但是,有句老话叫 “给定恰当的数据类型,一个简单的模型能比复杂 DNN 提供更好、更快的结果” 。虽然这有一些例外,但在今天,这句话仍然没有过时。因此,不管你是在计算机视觉( CV),自然语言处理(NLP)还是统计建模(Statistical Modelling)等领域,想要对原始数据预处理,有几个方法可以得到更好的训练数据:
-
获取越大的数据库越好。DNN 对数据很饥渴,越多越好。
-
去除所有包含损坏数据的训练样本,比如短文字,高度扭曲的图像,假输出标签,包含许多虚值(null values)的属性。
-
Data Augmentation(数据扩张)——生成新样例。以图像为例,重新调节,增加噪声等等。
2. 选择恰当的激励函数(activation function)
激励函数是所有神经网络的核心部分之一。
激励函数把渴望已久的非线性(non-linearity)加入了模型。多年来,Sigmoid 函数 一直是多数人倾向的选择。但是,Sigmoid 函数不可避免地存在两个缺陷:1. 尾部 sigmoids 的饱和,进一步导致梯度消失。2. 不以 0 为中心(输出在 0 到 1 之间)。
一个更好的替代选择是 Tanh 函数。数学上来说,Tanh 只是调整、平移过的 Sigmoid 函数:tanh(x) = 2*sigmoid(x) - 1。虽然 Tanh 仍旧存在梯度消失的缺陷,但好消息是:Tanh 以 0 为中心。因此,把 Tanh 作为激励函数能更快地收敛(converge)。我发现使用 Tanh 通常比 Sigmoid 效果更好。
你还可以探索其他选择,比如 ReLU, SoftSign 等等。对于一些特定任务, 它们能够改善上述问题。
3. 隐藏单元和隐层(Hidden Units and Layers)的数量
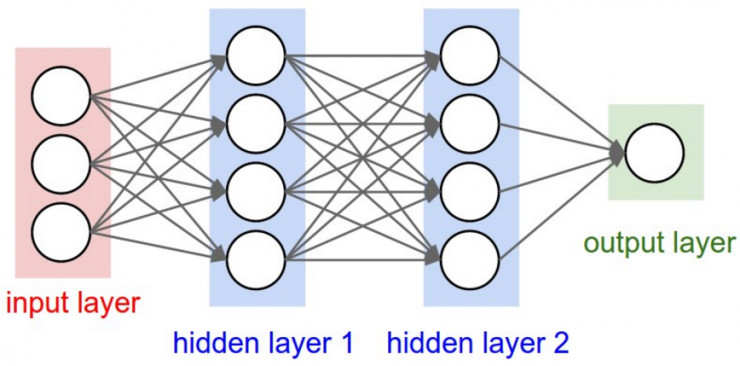
保留超出最优数量的隐藏单元,一般是比较保险的做法。这是因为任何正则化方法( regularization method)都会处理好超出的单元,至少在某种程度上是这样。在另一方面,保留比最优数量更少的隐藏单元,会导致更高的模型欠拟合(underfitting)几率。
另外,当采用无监督预训练的表示时(unsupervised pre-trained representations,下文会做进一步解释),隐藏单元的最优数目一般会变得更大。因此,预训练的表示可能会包含许多不相关信息(对于特定任务)。 通过增加隐藏单元的数目,模型会得到所需的灵活性,以在预训练表示中过滤出最合适的信息。
选择隐层的最优数目比较直接。正如 Yoshua Bengio 在 Quora 中提到的:
“你只需不停增加层,直到测试误差不再减少。”
4. 权重初始化 (Weight Initialization)
永远用小的随机数字初始化权重,以打破不同单元间的对称性(symmetry)。但权重应该是多小呢?推荐的上限是多少?用什么概率分布产生随机数字?
当使用 Sigmoid 激励函数时,如果权重初始化为很大的数字,那么 sigmoid 会饱和(尾部区域),导致死神经元(dead neurons)。如果权重特别小,梯度也会很小。 因此,最好是在中间区域选择权重,比如说那些围绕平均值均衡分布的数值。
幸运的是,已经有许多关于初始权重合适取值的研究。这对于高效的收敛非常重要。为初始化均衡分布的权重,均匀分布(uniform distribution )或许是最好的选择之一。另外,就像论文中所展示的( Glorot and Bengio, 2010) ,有更多输入连接(fan_in)的单位,应该有相对更小的权重。
多亏这些十分透彻的试验,现在我们已经有了经过检验的公式,可以直接用来权重的初始化。
比如说在 ~ Uniform(-r, r) 提取的权重,对于 tanh 激励 r=sqrt(6/(fan_in+fan_out));对于 sigmoid 激励 r=4*(sqrt(6/fan_in+fan_out)) 。fan_in 是上一层的大小, 而 fan_out 是下一层的。
5. 学习率
这或许是最重要的超参数之一,调节着学习过程。如果学习率设置得太小,你的模型很可能需要 n 年来收敛。设置得太大,再加上不多的初始训练样本,你的损失可能会极高。一般来说,0.01 的学习率比较保险。但雷锋网 (公众号:雷锋网) 提醒各位读者,这不是一个严格的标准。最优学习率与特定任务的属性息息相关。
相比固定学习率,在每个周期、或每几千个样例后逐渐降低学习率是另一个选择。虽然这能更快地训练,但需要人工决定新的学习率。一般来说,学习率可以在每个周期后减半。几年前,这种策略十分普遍。
幸运的是, 我们现在有了更好的、 基于动能(momentum based)的方法 ,来调整学习率。 这取决于误差函数的曲率。另外,既然有些参数有更快、或更慢的学习速率;它或许能帮助我们针对模型中的单独参数,设定不同的学习率。
最近有大量关于优化方法的研究,导致了 自适应学习率(adaptive learning rates) 。目前我们有许多选择,从老式动能方法( Momentum Method ),到 Adagrad、Adam (个人最爱)、 RMSProp 等等。;类似于 Adagrad 或 Adam 的方法,能替我们省去人工选择初始学习率的麻烦;给定合适的时间,模型会开始平滑地收敛。当然,选择一个特别合适的初始学习率仍然能起到帮助作用。
6. 超参数调参:扔掉网格搜索,拥抱随机搜索
网格搜索(Grid Search )在经典机器学习中十分普遍。但它在寻找 DNN 的最优超参数方面一点也不高效。这主要是由于 DNN 尝试不同超参数组合所耗费的时间。 随着超参数不断增长,网格搜索需要的计算性能会指数级增长 。
有两种解决办法:
-
取决于你之前的经验,你可以人工对部分常见超参数调参,比如学习率、隐层数目。
-
采用随机搜索(random search),或者随机采样代替网格搜索,来选择最优超参数。
超参数组合通常在期望范围之内、从均匀分布中被选择出来。加入之前获得的知识来进一步缩小搜寻空间,也是有可能的(比如,学习率不应该太大也不应该太小)。大家发现, 随机搜索比网格搜索高效地多。
7. 学习方法
随机梯度下降( Stochastic Gradient Descent )的老方法也许对于 DNN 不是那么有效率(有例外)。最近,有许多研究聚焦于开发更灵活的优化算法,比如 Adagrad、Adam,、AdaDelta,、RMSProp 等等。在提供自适应学习率之外,这些复杂的方法还对于模型的不同参数使用不同的学习率,通常能有更平滑的收敛。把这些当做超参数是件好事,你应该每次都在训练数据的子集上试试它们。
8. 权重的维度保持为 2 的幂
即便是运行最先进的深度学习模型,使用最新、最强大的计算硬件,内存管理仍然在字节(byte)级别上进行。所以,把参数保持在 64, 128, 512, 1024 等 2 的次方永远是件好事。这也许能帮助分割矩阵和权重,导致学习效率的提升。当用 GPU 运算,这变得更明显。
9. 无监督预训练(Unsupervised Pretraining )
不管你进行的是 NLP(自然语言处理)、计算机视觉还是语音识别等任务,无监督预训练永远能帮助你训练监督、或其他无监督模型:NLP 中词向量就(Word Vectors)无所不在;你可以用 ImageNet 的数据库,使用无监督方式对你的模型预训练,或是对于两个类别的监督分类;或是更大频域的音频样本,来在扬声器消崎模型(speaker disambiguation model)中使用该信息。
10. Mini-Batch(小批量) 对比随机学习(Stochastic Learning)
训练一个模型的主要目的是学习合适的参数,即产生输入到输出的最优映射。这些参数利用每个训练样本进行调参,不管你决定使用 batch, mini-batch 还是随机学习。当采用随机学习方法时,学习每个训练样本后权重的梯度都会进行调参,向梯度加入噪音(随机学习中“随机”的由来)。这样做的结果十分理想,比如说, 训练中加入的噪音使得模型更不容易过拟合 。
但是,随机学习方法也许效率不高。如今的计算设备有非常可观的运算能力,随机学习很可能会浪费其中的一大部分。如果我们能计算矩阵相乘,那么为什么要限制自己,重复单个矢量组之间的乘法呢?因此, 为了更高的吞吐率和更快的学习,我推荐使用 mini-batch 而不是随机学习。
但是, 选择适当的 batch 规模同样重要。 所以我们能保留一些噪音(相比大规模 batch),与此同时更高效地利用计算性能。一般来说,包含 16 个到 128 个样例的 batch(2 的幂)是不错的选择。通常,一旦你发现了更重要的超参数(通过随机搜索或是人工搜索),batch 规模就会确性下来。但是,有些场景中模型得到训练数据流(比如网络学习),那么采用随机学习就是不错的选择。
11. 打乱训练样本
这来自于信息理论(Information Theory)—— “学习到一件不太可能发生的事却发生了,比学习一件很可能发生的事已经发生,包含更多的信息。” 同样的,把训练样例的顺序随机化(在不同周期,或者 mini-batch),会导致更快的收敛。如果模型看到的很多样例不在同一种顺序下,运算速度会有小幅提升。
12. 使用 Dropout 正则化
如果有数百万的参数需要学习,正则化就是避免 DNN 过拟合的必须手段。你也可以继续使用 L1/L2 正则化, 但 Dropout 是检查 DNN 过拟合的更好方式 (雷锋网按:Dropout 是指随机让网络某些隐层节点的权重不工作,不工作的那些节点可以暂时认为不是网络结构的一部分,但是它的权重会保留下来)。执行 Dropout 很容易,并且通常能带来更快地学习。0.5 的默认值是一个不错的选择,当然,这取决于具体任务。如果模型不太复杂,0.2 的 Dropout 值或许就够了。
在测试阶段,Dropout 应该被关闭,权重要调整到相应大小。只要对一个模型进行 Dropout 正则化,多一点训练时间,误差一定会降低。
13. 周期 / 训练迭代次数
“对深度学习模型进行多个周期的训练,会得到更好的模型”——我们经常听到这句话。但多少周期才是“多”呢?其实,这里有一个简单的策略:继续按照一个固定的样例数或者周期训练模型,比如两万个样例或者一个周期。 在每批样例之后,比较测试误差(test error)和训练误差(train error),如果它们的差距在缩小,那么继续训练。 另外,记得在每批训练之后,保存模型的参数,所以训练好之后你可以从多个模型中做选择。
14. 可视化
训练深度学习模型有上千种出差错的方式。我猜大家都遇到过这样的场景:模型已经训练了几个小时或者好几天,然而在训练完成之后,才意识到某个地方出问题了。为了不让你自己神经错乱,一定要对训练过程作可视化处理 。比较显而易见的措施是保存或打印损失值、训练误差、测试误差等项目的日志。
在此之外,一个很好的措施是采用可视化库(visualization library ),在几个训练样例之后、或者周期之间,生成权重柱状图。这或许能帮助我们追踪深度学习模型中的一些常见问题,比如梯度消失与梯度爆发(Exploding Gradient)。
15. 使用支持 GPU 和自动微分法 (Automatic Differentiation)的库
谢天谢地,对于快速创建原型模型,我们已经有了相当不错的库,比如 Theano, Tensorflow, Keras 等等。几乎所有这些深度学习库支持 GPU 计算和自动微分法。所以,你不需要深入研究核心 GPU 编程技术(除非你想——这绝对很有意思)。你也不需要写自己的微分代码——在非常复杂的模型上这相当费劲(但若需要,你应该有能力去做)。 Tensorflow还提供了分布式计算的支持——如果你是土豪的话。
最后雷锋网提醒,这并不是训练 DNN 的完整注意事项表。为了容纳最常见的实践方法,作者去除了一些概念,比如 Normalization of inputs, Batch/Layer Normalization, Gradient Check 等。
via github
相关文章:
机器学习零基础?手把手教你用TensorFlow搭建图像识别系统(三)| 干货
机器学习零基础?手把手教你用TensorFlow搭建图像识别系统(二)| 干货
机器学习零基础?手把手教你用TensorFlow搭建图像识别系统(一)| 干货
雷锋网版权文章,未经授权禁止转载。详情见 转载须知 。

正文到此结束
热门推荐










相关文章






Loading...
![[HBLOG]公众号](https://www.liuhaihua.cn/img/qrcode_gzh.jpg)

