玩转 Ceph 的正确姿势
玩转 Ceph 的正确姿势
本文先介绍 Ceph, 然后会聊到一些正确使用 Ceph 的姿势;在集群规模小的时候,Ceph 怎么玩都没问题;但集群大了(到PB级别),这些准则可是保证集群健康运行的不二法门;
Ceph 最初的目标是做一个分布式文件系统,直到现在这个目标也不能算完美实现;目前官网上对它的文件系统还是谨慎推荐的态度(不建议对线上核心业务部署);
业界使用 Ceph ,大多是用它的对象存储;
Ceph 客户端
Ceph 支持三种存储接口:对象存储 RGW(rados gateway)、块存储 RBD(rados block device) 和文件存储 CephFS;
这三个接口只是在客户端的封装库不同,到服务端了都是对象存储;
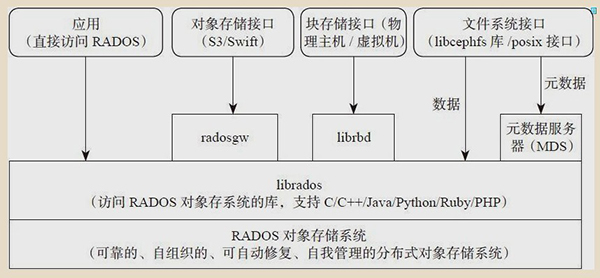
对象存储(RGW:RADOS gateway)
Ceph 对象存储服务提供了 REST 风格的 API ,它有与 Amazon S3 和 OpenStack Swift 兼容的接口。也就是通常意义的键值存储,其接口就是简单的GET、PUT、DEL和其他扩展;
块存储(RBD:RADOS block device)
RBD 是通过librbd库对应用提供块存储,主要面向云平台的虚拟机提供虚拟磁盘;RBD类似传统的SAN存储,提供数据块级别的访问;
目前 RBD 提供了两个接口,一种是直接在用户态实现, 通过 QEMU Driver 供 KVM 虚拟机使用。 另一种是在操作系统内核态实现了一个内核模块。通过该模块可以把块设备映射给物理主机,由物理主机直接访问。
文件存储
Ceph 文件系统服务提供了兼容 POSIX 的文件系统,可以直接挂载为用户空间文件系统。它跟传统的文件系统如Ext4是一个类型,区别在于分布式存储提供了并行化的能力;
原生接口
除了以上3种存储接口, 还可以直接使用 librados 的原生接口,直接和RADOS通信;
原生接口的优点是是它直接和和应用代码集成,操作文件很方便;但它的问题是它不会主动为上传的数据分片;一个1G的大对象上传,落到 Ceph 的存储磁盘上就是1G的文件;
而以上三个接口是具有分片功能(即: 条带化 file-striping )
PS:两个对象的区分
需要说明下,这里提到两个对象的概念:一个是 RGW中的对象存储,一个是 Ceph 的后端存储的对象;这两个需要区分:
-
第一个对象面向用户,是用户接口能访问到的对象;
-
第二个对象是ceph 服务端操作的对象;
eg:使用RGW接口,存放一个1G的文件,在用户接口看到的就是存放了一个对象(1);而通过RGW 分片成多个对象(2)后最终存储到磁盘上;
Ceph 服务端
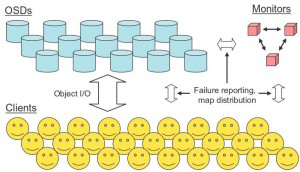
服务端 RADOS 集群主要由两种节点组成:一种是为数众多的、负责完成数据存储和维护功能的OSD(Object Storage Device),另一种则是若干个负责完成系统状态检测和维护的monitor。
Monitor
Monitor 集群提供了整个存储系统的节点信息等全局的配置信息,通过 Paxos 算法保持数据的一致性。
Pool 、PG和OSD
Pool是存储对象的逻辑分区,它规定了数据冗余的类型和对应的副本分布策略;支持两种类型:副本(replicated)和 纠删码( Erasure Code);目前我们公司内部使用的Pool都是副本类型(3副本);
PG( placement group)是一个放置策略组,它是对象的集合,该集合里的所有对象都具有相同的放置策略;简单点说就是相同PG内的对象都会放到相同的硬盘上; PG是 ceph的核心概念, 服务端数据均衡和恢复的最小粒度就是PG;
OSD是负责物理存储的进程,一般配置成和磁盘一一对应,一块磁盘启动一个OSD进程;
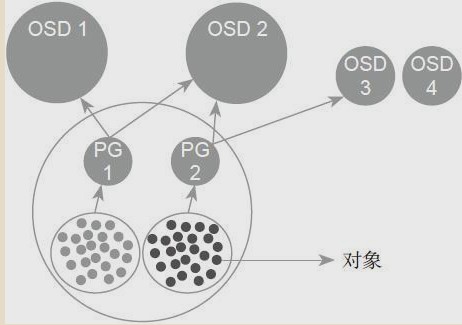
下面这张图形象的描绘了它们之间的关系:
- 一个Pool里有很多PG,
- 一个PG里包含一堆对象;一个对象只能属于一个PG;
- PG有主从之分,一个PG分布在不同的OSD上(针对三副本类型)
讲究的PG
一个Pool里设置的PG数量是预先设置的,PG的数量不是随意设置,需要根据OSD的个数及副本策略来确定:
Total PGs = ((Total_number_of_OSD * 100) / max_replication_count) / pool_count
线上尽量不要更改PG的数量,PG的数量的变更将导致整个集群动起来(各个OSD之间copy数据),大量数据均衡期间读写性能下降严重;
良好的工程实践建议(掉坑后的教训):
预先规划Pool的规模,设置PG数量;一旦设置之后就不再变更;后续需要扩容就以 Pool 为维度为扩容,通过新增Pool来实现(Pool通过 crushmap实现故障域隔离);
对象的寻址过程
查找对象在集群中的存储的位置,具体分为两步:
第一步,对象到PG的映射;将对象的id 通过hash映射,然后用PG总数对hash值取模得到pg id:
pg_ id = hash( object_ id ) % pg_num
第二步,PG到osd列表映射; 通过crush算法计算PG 上的对象分布到哪些OSD硬盘上;
CRUSH(PG_ID) =⇒ OSD
CRUSH算法是 ceph的精华所在;
crush的目标
先看看crush算法的希望达成的目标:
- 数据均匀的分布到集群中;
- 需要考虑各个OSD权重的不同(根据读写性能的差异,磁盘的容量的大小差异等设置不同的权重)
- 当有OSD损坏需要数据迁移时,数据的迁移量尽可能的少;
crush算法
简单说下crush算法的过程:
第一步输入PG id、可供选择的OSD id 列表,和一个常量,通过一个伪随机算法,得到一个随机数,伪随机算法保证了同一个key总是得到相同的随机数,从而保证每次计算的存储位置不会改变;
CRUSH_HASH( PG_ID, OSD_ID, r ) = draw
第二步将上面得到的随机数和每个OSD的权重相乘,然后挑出乘积最大的那个OSD;
( draw &0xffff ) * osd_weight = osd_straw
在样本容量足够大之后,这个随机数对挑中的结果不再有影响,起决定性影响的是OSD的权重,也就是说,OSD的权重越大,被挑中的概率越大。
到这里了我们再看看crush算法如何达成的目标:
通过随机算法让数据均衡分布,乘以权重让挑选的结果考虑了权重;而如果出现故障OSD,只需要恢复这个OSD上的数据,不在这个节点上的数据不需移动;
crush优缺点
聊到这里,crush算法的优缺点就明显了:
优点如下:
- 输入元数据( cluster map、 placement rule) 较少, 可以应对大规模集群。
- 可以应对集群的扩容和缩容。
- 采用以概率为基础的统计上的均衡,在大规模集群中可以实现数据均衡。
缺点呢:
- 在小规模集群中, 会有一定的数据不均衡现象(权重的影响低,主要起作用的是伪随机算法)。
看清楚了寻址的过程,就明白为啥PG不能轻易变更了;PG是寻址第一步中的取模参数,变更PG会导致对象的PG id 都发生变化,从而导致整个集群的数据迁移;
这里只是做个引子,关于crush算法,这篇文章讲的通俗直白,有兴趣的移步: 大话Ceph--CRUSH那点事儿
Ceph 是Sega本人的博士论文作品, 其博士论文被整理成三篇短论文,其中一篇就是 CRUSH,
CRUSH论文标题为 《CRUSH: Controlled, Scalable, Decentralized Placement of Replicated Data》 ,介绍了CRUSH的设计与实现细节。
(PS:另外两篇是 RADOS 和 CephFS , 分别讲 Ceph 的服务器实现和 Ceph 文件系统的细节实现)
故障域的划分
刚开始接触 Ceph,通常会忽略 crushmap ,因为即使对它不做任何设置,也不影响我们的正常使用;
一旦集群大了,没有它集群就处于一个危险的运行状态中;
没有故障域的划分,整个集群就处于一个未隔离的资源池中;
一个对象存过去,可能落在 500个OSD硬盘的任意三个上;
如果一块硬盘坏了,可能带来的是全局影响(副本copy,这个硬盘上丢失的PG副本可能分布在全局各个硬盘上);
使用crushmap 将整个集群的OSD 划分为一个个故障域,类似将一个集群按业务划分成为了多个小集群;每个Pool 只会用到特定的 OSD,这样,一旦某个OSD 损坏,影响的只是某个业务的某个Pool,将故障的范围控制在一个很小的范围内。
良好的工程实践建议:
使用crushmap 划分故障域,将pool限制在特定的osd list上,osd的损坏只会引起这个pool内的数据均衡,不会造成全局影响;
服务端对象的存储
对象是数据存储的基本单元, 一般默认 4MB 大小(这里指的是RADOS的底层存储的对象,非RGW接口的对象)。
对象的组成分为3部分:key 、value、元数据;
- 元数据可直接存在文件的扩展属性中(必须是标准的文件属性),也可存到levelDb中;
- value 就是对象数据,在本地文件系统中用一个文件存储;
对于大文件的存储,Ceph 提供的客户端接口会对大文件分片(条带化)后存储到服务端;这个条带化操作是在客户端接口程序完成的,在 Ceph 存储集群内存储的那些对象是没条带化的。客户端通过 librados 直接写入 Ceph 存储的数据不会分片。
良好的工程实践建议:
对于对象存储,只使用 Ceph 提供的 RGW 接口, 不使用 librados原生接口;不仅有分片功能,扩展也更容易(RGW是无状态的,可水平扩展);大量大对象直接存放到 Ceph中会影响 Ceph 稳定性(存储容量达到60%后);
总结
上线 Ceph 前,先规划未来一年的预期使用量,为每个 pool 一次性设置 PG之后不再变更; 使用crushmap 设置故障域隔离,将磁盘故障后带来的数据平衡控制在一个小的范围之内。接口方面推荐只使用Ceph 提供的RGW 接口,不使用 librados原生接口。做好这些, 你的 Ceph 用起来会省心很多。
参考
Ceph官网
Ceph 中文文档
《Ceph源码剖析》
正文到此结束
热门推荐










相关文章






Loading...
![[HBLOG]公众号](https://www.liuhaihua.cn/img/qrcode_gzh.jpg)

