用Hackrf One制作超级跑马机
*本文原创作者:b4k3r,本文属FreeBuf原创奖励计划,未经许可禁止转载
0×00 驾校的困惑
现行规定要求每个学员都必须在驾校练习够规定的学时,才能参加考试,在每台教练车上都安装有计时计程终端,学员刷卡刷指纹后开始累计里程。但是目前中国的很多驾校,存在车少人多的情况,假设有 300 个学员,但是只有 20 台车,每个学员要跑够 50km,而学员都很忙,只能业余时间练习,这种情况下是完全不可能满足要求的。
于是,跑马机应运而生,它通过伪造 GPS 轨迹,欺骗车载计程终端,达到刷学时数的目的。然而,受限于其硬件,使用效果非常不好,每个跑马机只能安装于一个终端,并且速度很不稳定,时快时慢,可能会长时间静止,也可能从飙车速度突然降到步行速度.使用跑马机的驾校经常会出现如下的场面:

因为跑马机很不可靠,所以对于实在刷不够的学时,教练只能开着车去高速公路兜一圈,在油价飞涨的今天,每兜一圈驾校老板的心都要滴一次血。
既然跑马机的原理是伪造 GPS 信号,那么我想起了那个被我用来折腾过所有能接触到的遥控门,遥控车,遥控飞机之后,留在角落里吃土很久的 hackrf one。
Hackrf one 可以稳定的伪造 GPS 信号,并且不需要安装在接收设备上,只要是在发射范围内的接收机,都可能被伪造的信号欺骗,所以把它当做”超级跑马机”使用,理论上是完全可以的。想到了这一点,我一言不合就开始干。
需要的设备:
笔记本电脑一台,配置随意,最好安装 linux 系统;hackrf one 一块(带 TCXO 时钟模块和天线);连接数据线一条.
然后安装好 hackrf 所需的驱动和 hackrf-tools,具体安装方法这里不做介绍,网上有很多.
用到的软件:
gps-sdr-sim;Gnuradio;hackrf-tools;SatGen Trajectory Generation;Google Earth
具体流程: 获取GPS导航电文->制作运动轨迹文件->生成采样数据->发射模拟GPS 信号.
0×01 GPS 导航电文
要伪造 GPS 信号,首先需要获取 GPS 卫星的观测数据,在早期,各个接收机厂商的数据格式各不相同,现在已经普遍采用统一的 RINEX 格式, RINEX 本质上是文本文件, 其数据记录与接收机的制造厂商和具体型号无关,可以做到全通用,目前使用最广泛的是其第 2 版格式,RINEX 文件遵循标准的命名规则,具体如下图所示:
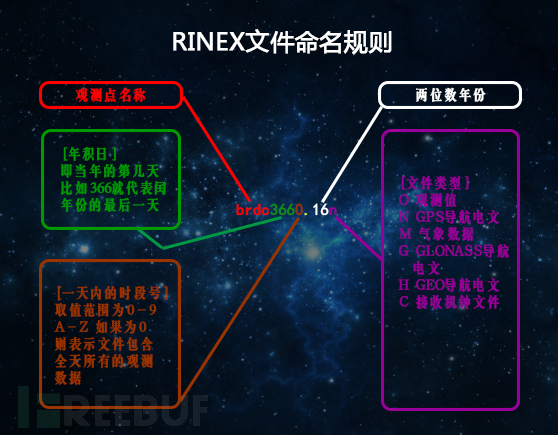
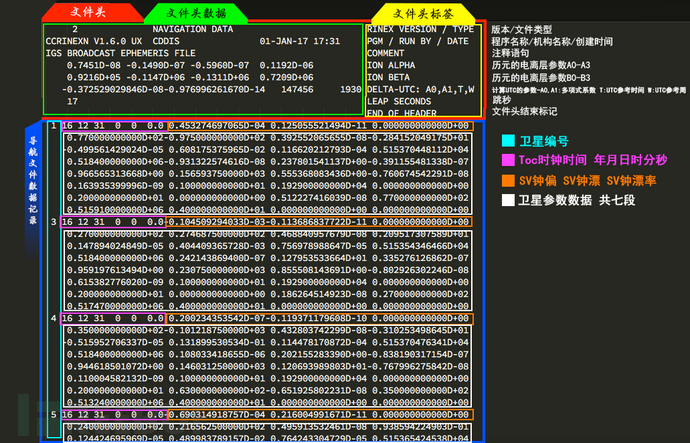
以上每种文件类型,其数据格式均不相同,这里我们只需要使用 GPS 导航电文,用文本编辑器打开后,其具体内容和格式说明如下:
那么问题来了,我们从哪里获取 RINEX 格式的 GPS 导航电文呢?
答案是找 NASA.
打开这个地址 ftp://cddis.gsfc.nasa.gov/pub/gps/data/daily,里面是多个以年份命名的文件夹,在里面的 brdc 子目录中,按照上面的命名规则,找到并下载相应年积日对应的 GPS 导航电文文件,比如 2016 年 12 月 31 日的数据,文件名是brdc3660.16n.z,下载然后解压缩,得到的 brdc3660.16n 就是导航电文文件.
0×02 运动坐标轨迹文件
导航电文有了,我们就有了 GPS 信号的数据资源,接下来我们还需要具体的运动轨迹坐标,事实上,现在很多的驾校都是有电子围栏的,也就是说,教练车的运动轨迹随时都在监控之中,其坐标必须在驾校的活动场地之内才能算学时,所以我们要伪造的运动轨迹,也必须使用真实的所在驾校的坐标,这里我们需要利用 Google Earth。
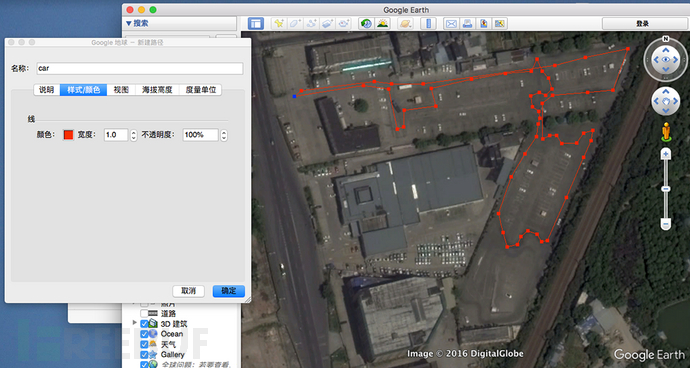
首先启动 Google Earth,调整视野,寻找到驾校所在地区,然后寻找驾校的位置,让驾校的练习场地完全出现在视野中,然后点击工具栏上的添加路径:

在地图上,沿着驾校的练习场地,点击勾画出一个运动轨迹,尽可能的符合正常行车的路线:
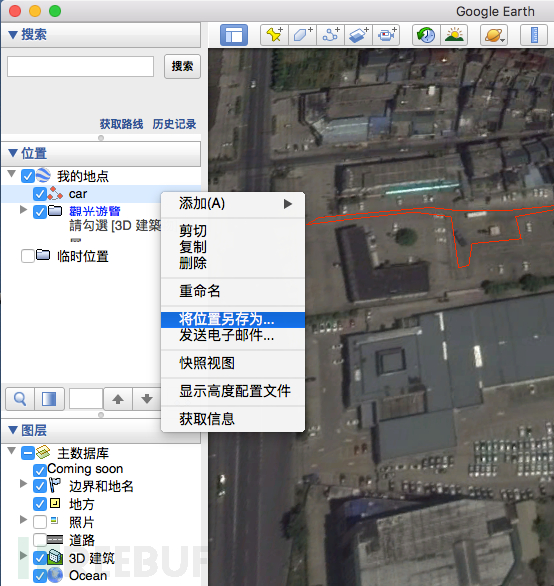
为路径起名,点击确定后,它就会出现在左侧的位置列表之中,在上面点击右键,选择”将位置另存为”,将之保存为 kml 文件:
保存后的 kml 文件,是不能够直接使用的,它本质上只是一种包含路径中关键坐标点的格式,并不包含实际运动轨迹中加速,减速,静止这样的数据,我们要对其进行转换。
在本案例中,我们需要将 kml 文件转换成两种格式的轨迹数据文件(两种中任一种),下面分别做介绍:
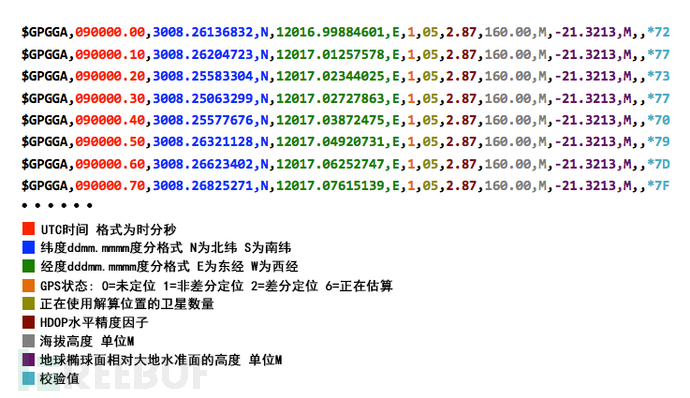
1. NMEA 格式文件
NMEA 是 GPS 导航设备统一的 RTCM 标准协议,具体内容是一行行的描述坐标,海拔及时间轨迹的语句,主要有 GPGGA、GPGSA、GPGSV、GPRMC、GPVTG、GPGLL 等语句格式,这里我们只需要 GPGGA 格式,其内容如下:
2. ECEF 坐标轨迹文件
ECEF 坐标系又叫地心地固坐标系,它是一个笛卡尔右手坐标系,用 xyz 三个坐标轴来描述地表的某特定位置,具体如下图所示:
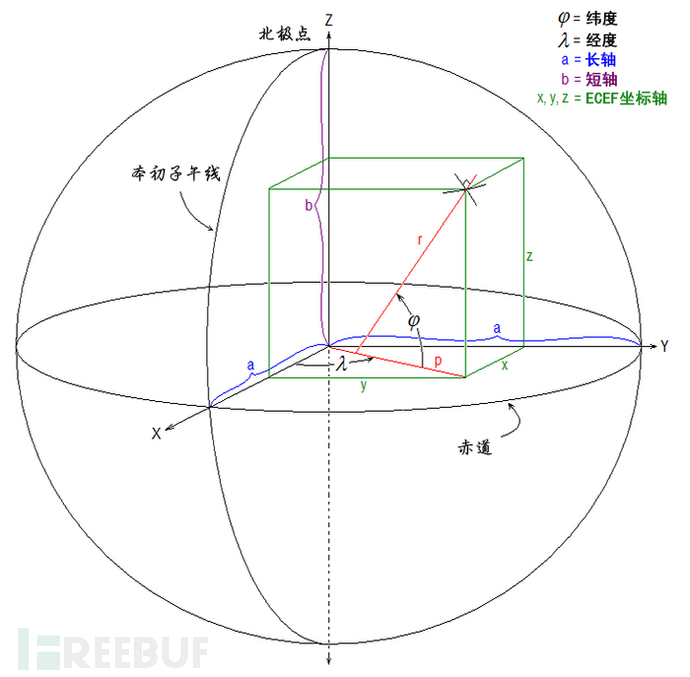
ECEF 的原点与地球质心重合,x 轴从原点出发,延伸至本初子午线与赤道的交点,z轴延伸至北极点,y 轴遵循右手坐标系与 x 和 z 构成的平面垂直。
ECEF 的轨迹文件(csv 格式),格式很简单:时间(秒),x 坐标,y 坐标,z 坐标,示例如下:
0.0,-3813477.954, 3554276.552, 3662785.237
0.1,-3813477.599, 3554276.226, 3662785.918
0.2,-3813477.240, 3554275.906, 3662786.598
0.3,-3813476.876, 3554275.590, 3662787.278
0.4,-3813476.508, 3554275.280, 3662787.958
0.5,-3813476.135, 3554274.975, 3662788.638
0.6,-3813475.757, 3554274.675, 3662789.318
0.7,-3813475.375, 3554274.381, 3662789.997……………
格式介绍完了,接下来,我们把 kml 文件转换成 NMEA 格式,这里我们需要用到一个小工具,它由 LabSat 提供,是 SatGen 软件的一个极简免费版(下载地址见文末):
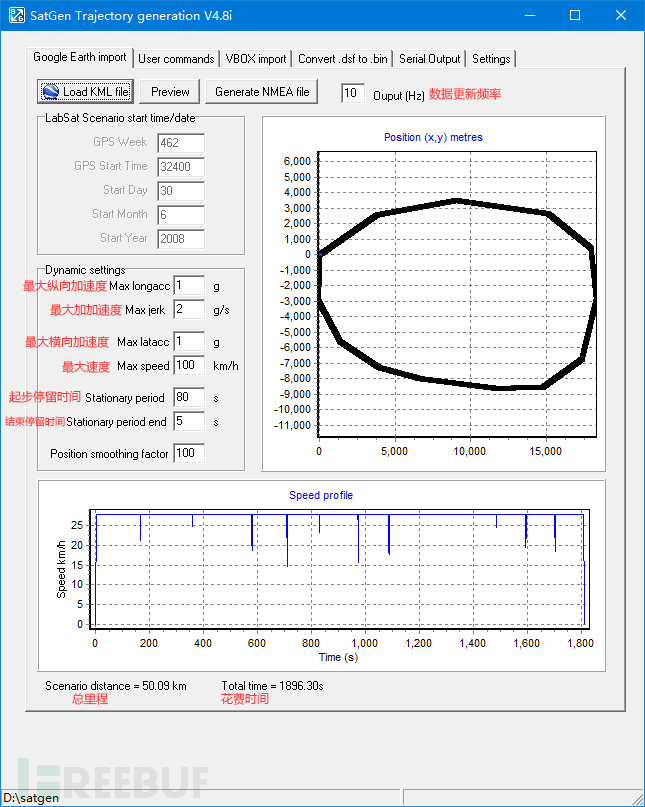
将频率设置为 10hz,然后点击”Load KML file”,就会自动加载 kml 路径,然后点击”Generate NMEA file”,即可生成标准的 NMEA 轨迹文件。
注意此软件会模拟真实的运动情况,比如拐弯会减速,起步和结束时会有停留 ,这些由横向加速度、纵向加速度、加加速度、最大速度、起步停留时间、结束停留时间这几个参数控制,默认设置是不适合于我们的。这里我们举个例子,一辆由老司机驾驶的汽车,和钢铁侠进行对比:
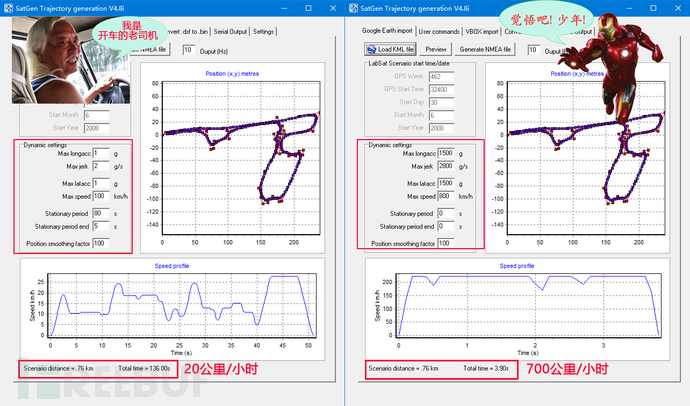
很明显,在越复杂的运动轨迹下,参数设置的越接近实际物理情况,平均速度就越慢,要想在驾校稳定保持 100km/h 以上的飙车速度,我们必须增大三个加速度和最大速度的值,然后将起步和结束停留时间设置为 0 才可以。当然,如果驾校没有电子围栏,我们完全可以生成一个包含超长纯直线路径的 kml 文件,这样使用默认设置转换成 NMEA 后,仍然可以达到 100km/h 的稳定匀速.
0×03 生成采样数据文件
利用上面得到的 GPS 导航电文和 NMEA 文件, 我们可以使用开源项目 gps-sdr-sim,生成一个采样数据文件,该文件会作为我们后面实际工作时的数据源。首先下载 gps-sdr-sim 的源码:
$ git clone https://github.com/osqzss/gps-sdr-sim.git $ cd gps-sdr-sim
然后编译运行:
$ gcc gpssim.c -lm -O3 -o gps-sdr-sim
最后按以下参数执行:
[NMEA 轨迹]
$./gps-sdr-sim -e <导航电文文件> -g <轨迹文件> -b 8[ECEF 轨迹] $./gps-sdr-sim –e <导航电文文件> -u <轨迹文件> -b 8
如果不事先指定名称,默认在程序所在目录生成名为 gpssim.bin 的数据文件。关于 ECEF 轨迹文件, gps-sdr-sim 在 satgen 目录中提供了一个小工具,可以把 NMEA 格式转换为 ECEF:
$ cd satgen $ gcc nmea2um.c –o nmea2um
然后执行 nmea2um <源文件> <目标文件>就可以了.事实上,查阅源码会发现,在实际使用中, gps-sdr-sim 也是把 NMEA 转换成 ECEF 使用的.
为了更好的说明 gps-sdr-sim 各项参数的含义,我在编译前对 Usage 做了汉化:
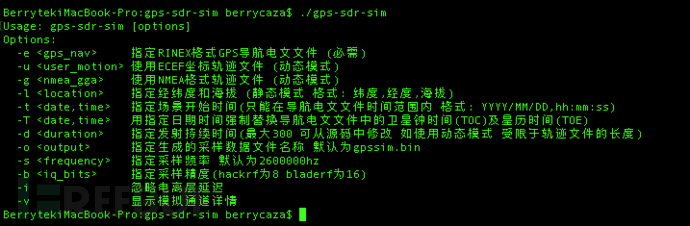
gps-sdr-sim 默认最大只能生成 300 秒的数据,需要在编译前,修改 gpssim.h 文件,找到这一行:
#define USER_MOTION_SIZE(3000)
注意这里的值是乘以十的,3000 代表 300 秒,将其修改为我们需要的时间再编译即可,修改的值越大,生成的文件体积越大,比如修改为 3000 秒后体积会达到将近15G 大小,不过相对于现在动辄 1t 的硬盘容量来说,这点体积并没有什么卵用.
需要特别注意的是,不管是哪种轨迹格式,实际使用中其持续时间受限于文件中的时间长度,即使按照前面的方法修改了 USER_MOTION_SIZE 的值,如果轨迹文件的时间长度小于该值,仍然会以轨迹文件为准。
为了让持续时间长一些,我们可以制作多个轨迹文件,然后进行合并,或者干脆图省事,用文本编辑器把轨迹文件的所有行全选,然后复制 N 遍└(^o^)┘
0×04 猥琐的行为终于开始了
现在,一切就绪,我们把生成的 gpssim.bin 文件,转换为信号发射出去,车载计程终端会被干扰,将其当做真实的 gps 信号,然后我们的目的就达到了,驾校的每一辆车都会以飙车速度”狂奔”.然后驾校老板笑逐颜开,然后我们会有银子赚,哇卡卡卡…..≥▽≤
这里特别说明,最初下载的 GPS 导航电文的年积日是哪一天,开始发射信号后,接收终端的时间就会变成相应的日期,如果需要准确日期,请下载当天的导航电文或者在生成采样数据时,使用-T 参数强制指定日期和时间.发射信号具体的实现,有以下三种方法:
1. 驾校老板只想傻瓜化:
安装 gnuradio ,按照下图搭个流程图,运行即可:
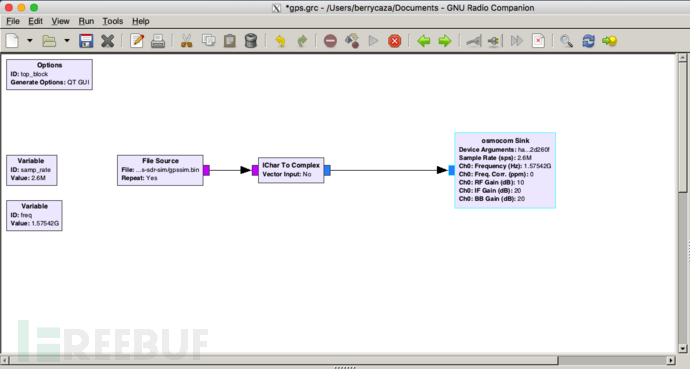
以上流程图中,采样速率使用 2600000,发射频率 1575420000hz 即是 GPS 民用L1 频段的频率.File Source 模块使用的是我们生成的 gpssim.bin 文件.
2. 驾校老板想用命令行装逼,这样看起来比较高大上:
使用 hackrf-tools 自带的 hackrf_transfer,执行如下命令:
$ hackrf_transfer -t gpssim.bin -f 1575420000 -s 2600000 -a 1 -x 0 –R
3. 驾校老板非常厉害,会编程(好像实际中也不大可能-_-|||)
在 gps-sdr-sim 的 player 子目录中,有段源码 hackplayer.c,可以直接调用libhackrf 发射信号,不过奇怪的是它居然是 Windows 代码,但移植到 Linux 也很简单,稍作改动即可,这里我直接提供改好的代码下载(地址见文末),然后编译,运行:
$ gcc hackplayer.c -lhackrf -O3 -o hackplayer $ ./hackplayer gpssim.bin
以上三种方法,效果完全一样,不同的只是逼格,下面是实际测试的效果,非常好,一台 hackrf 可以同时为很多个终端提供服务,并且速度基本稳定维持在预先定义的100km/h:


当然,如果老板不怕考试中心的交警叔叔来找麻烦,或者老板和交警叔叔是好基友,那么你预先设置成钢铁侠速度甚至火箭速度也是可以的… -.-
0×05 补充
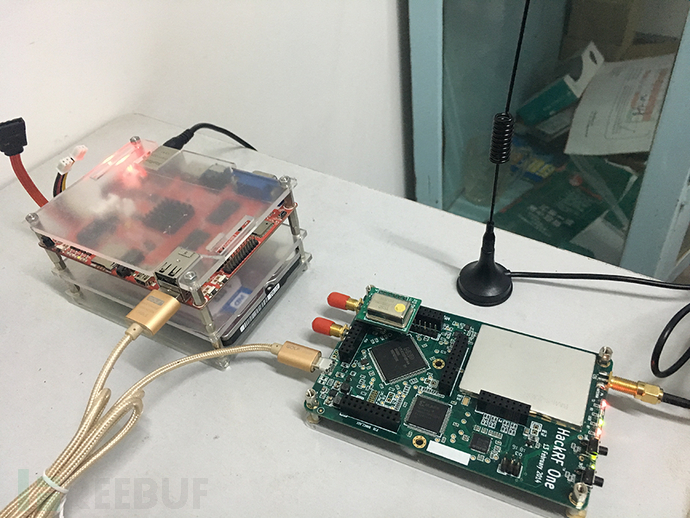
我们还可以进一步节约成本,用安装好 Linux 的 arm 开发板来替代电脑,这样成本只需几百块钱,这里我使用 Cubietruck,系统为 Debian 7,Debian 源里已经有了armhf平台的hackrf,直接apt-get 安装,然后把生成好的gpssim.bin拷贝进去(需要注意,此类开发板功率比较低,同时接硬盘和 hackrf 带不起来,而 gpssim.bin 体积比较大,所以只能使用大容量 tf 卡来存放),写个两行脚本(gpssim.bin15的路径写成实际的绝对路径):
#!/bin/bash hackrf_transfer –t gpssim.bin -f 1575420000 -s 2600000 -a 1 -x 0
保存成 start.sh,添加权限:
$ sudo chmod 777 start.sh
然后在/etc/rc.local 加入一行(start.sh 的路径写成实际的绝对路径):
sh start.sh
用 usb 线接好开发板和 hackrf one,这样开发板在启动后就会自动开启 hackrfone 的信号发射:
最后,我必须严肃的,负责任的,不误人子弟的讲清楚,即便因为人多车少或者自己没有时间练习亦或是其他原因,用了这样的方法在驾校刷够了学时,拿到了驾照,但是仍然应该自己想办法,以其他方式进行多次练习直至熟练才能真正上路,毕竟,有无数血的教训证明,靠作弊得来的驾照,上路真的危险重重……
本文所涉及到的工具和源码下载地址: 百度云
*本文原创作者:b4k3r,本文属FreeBuf原创奖励计划,未经许可禁止转载
正文到此结束
热门推荐










相关文章






Loading...
![[HBLOG]公众号](https://www.liuhaihua.cn/img/qrcode_gzh.jpg)

