机器学习的数学基础:线性代数进阶篇
前言
在前面两篇文章中,我简要概括了线性代数中两个最基本的数据表达方式:矩阵 和向量。有了这两个数学工具作为基础,我们可以再进一步,讨论下面一些内容:
- 如何求解线性空间的基?
- 向量的子空间、零空间、列空间、行空间、左零空间都是什么东西?怎么求解?
- 如何用线性代数的知识来拟合数据?
- 机器学习、图像处理中常见的“特征向量”究竟是什么东西?它和变换矩阵有什么联系?
本篇文章将作为线性代数子系列的最终篇。
阶梯形矩阵
阶梯形矩阵是一类非常实用的工具,可以帮助我们求解出线性空间的基,这就能用在诸如计算解不唯一的方程组之类的问题上。
阶梯形矩阵
若矩阵 /(/mathbf{A}/) 满足两条件:
- 若有零行(元素全为0的行),则零行应在最下方;
- 非零首元(即非零行的第一个不为零的元素)的列标号随行标号的增加而严格递增。
则称此矩阵 /(/mathbf{A}/) 为阶梯形矩阵。
示例:
/[ /begin{bmatrix} 2 & 0 & 2 & 1 // 0 & 5 & 2 & -2 // 0 & 0 & 3 & 2 // 0 & 0 & 0 & 0 /end{bmatrix} /]
行简化阶梯形矩阵
若矩阵 /(/mathbf{A}/) 满足两条件:
- 它是阶梯形矩阵;
- 非零首元所在的列除了非零首元外,其余元素全为0。
则称此矩阵 /(/mathbf{A}/) 为行简化阶梯形矩阵。
示例:
/[ /begin{bmatrix} 2 & 0 & 2 & 1 // 0 & 5 & 2 & -2 // 0 & 0 & 3 & 2 // 0 & 0 & 0 & 0 /end{bmatrix} /]
行最简形矩阵
若矩阵 /(/mathbf{A}/) 满足两条件:
- 它是行简化阶梯形矩阵;
- 非零首元都为1
则称此矩阵 /(/mathbf{A}/) 为行最简形矩阵。
将矩阵化简成行最简阶梯形
对如下矩阵
/[ /begin{bmatrix} 1 & 2 & 1 & 1 & 7// 1 & 2 & 2 & -1 & 12// 2 & 4 & 0 & 6 & 4 /end{bmatrix} /]
,使用初等变换可以将这个矩阵转换成如下的形式:
/[ /begin{bmatrix} 1 & 2 & 1 & 1 & 7// 1 & 2 & 2 & -1 & 12// 2 & 4 & 0 & 6 & 4 /end{bmatrix} /rightarrow /begin{bmatrix} 1 & 2 & 1 & 1 & 7// 0 & 0 & 1 & -2 & 5// 2 & 4 & 0 & 6 & 4 /end{bmatrix} /rightarrow /begin{bmatrix} 1 & 2 & 1 & 1 & 7// 0 & 0 & 1 & -2 & 5// 0 & 0 & -2 & 4 & -10 /end{bmatrix} /rightarrow /begin{bmatrix} 1 & 2 & 1 & 1 & 7// 0 & 0 & 1 & -2 & 5// 0 & 0 & 0 & 0 & 0 /end{bmatrix} /rightarrow /begin{bmatrix} 1 & 2 & 0 & 3 & 2// 0 & 0 & 1 & -2 & 5// 0 & 0 & 0 & 0 & 0 /end{bmatrix} /]
行最简形非常实用。例如,对于下面的方程组:
/[/left/{ /begin{eqnarray} x_1 + 2x_2 + x_3 + x_4 &=& 7 /// x_1 + 2x_2 + 2x_3 - x_4 &=& 12 /// 2x_1 + 4x_2 + 6x_4 &=& 4 /end{eqnarray} /right. /]
只有三个方程,肯定无法求解出四个未知数(此时如果在用 numpy.linalg.solve 求解这个矩阵会引发 LinAlgError ),但是通过化成行最简形,我们可以进一步找出变量的限制关系。先将方程组表达成增广矩阵形式:
/[ /begin{bmatrix} 1 & 2 & 1 & 1 & 7// 1 & 2 & 2 & -1 & 12// 2 & 4 & 0 & 6 & 4 /end{bmatrix} /]
这个矩阵和完全和我们上一步给出的矩阵相同,因此其行简化阶梯性就是
/[ /begin{bmatrix} 1 & 2 & 0 & 3 & 2// 0 & 0 & 1 & -2 & 5// 0 & 0 & 0 & 0 & 0 /end{bmatrix} /]
对于方程组,非0首元位置对应的变量就叫做 主元变量 ,其他的变量就叫做 自由变量 。例如上面的行最简形,/(x_1/) 和 /(x_3/) 是首元变量,/(x_2/) 和 /(x_4/) 就是自由变量。我们可以将方程改写成下面的形式:
/[ /left/{ /begin{eqnarray} x_1 &=& 2 - 2x_2 - 3x_4 /// x_3 &=& 5 + 2x_4 /end{eqnarray} /right. /]
然后可以得到:
/[ /begin{bmatrix} x_{ 1 } // x_{ 2 } // x_{ 3 } // x_{ 4 } /end{bmatrix}=/begin{bmatrix} 2 // 0 // 5 // 0 /end{bmatrix}+x_{ 2 }/underbrace { /begin{bmatrix} -2 // 1 // 0 // 0 /end{bmatrix} }_{ /vec{/mathbf{a}} } +x_{ 4 }/underbrace{/begin{bmatrix} -3 // 0 // 2 // 1 /end{bmatrix}}_{/vec{/mathbf{b}}} /]
观察这个结果,方程组的解集就是向量 /(/vec{/mathbf{a}}/) 和向量 /(/vec{/mathbf{b}}/) 的线性组合。这两个向量张成了 /(/mathbb{R}^1/) 中的一个平面。
线性子空间
在前面的内容中我们已经多少涉及到了一些关于空间、张成空间的知识了。有时候我们需要从一个空间 /(K/) 里头挑出一些向量张成一个新的空间 /(/mathbf{W}/) ,这个空间 /(/mathbf{W}/) 就是原来的向量 /(/mathbf{K}/) 的子空间。
定理:设 /(/mathbf{V}/) 是在域 /(/mathbf{K}/) 上的向量空间,并设 /(/mathbf{W}/) 是 /(/mathbf{V}/) 的子集。则 /(/mathbf{W}/) 是个子空间,当且仅当它满足下列三个条件:
- 零向量 0 在 /(/mathbf{W}/) 中。
- 加法封闭:如果 /(/vec{/mathbf{u}}/) 和 /(/vec{/mathbf{v}}/) 是 /(/mathbf{W}/) 的元素,则向量和 /(/mathbf{/vec{/mathbf{u}}+/vec{/mathbf{v}}}/) 是 /(/mathbf{W}/) 的元素。
- 标量乘法封闭:如果 /(/vec{/mathbf{u}}/) 是 /(/mathbf{W}/) 的元素而 /(c/) 是标量,则标量积 /(c/vec{/mathbf{u}}/) 是 /(/mathbf{W}/) 的元素。
子空间的引入有助于我们更专注于某类线性组合,从中找出这些子空间的特点,以及与原来的空间的关系。下面将列举几种典型的子空间。
零空间
矩阵 /(/mathbf{A}/) 的零空间 /(N(/mathbf{A})/) 就是由满足 /(/mathbf{A}/vec{/mathbf{x}}=0/) 的所有向量 /(/vec{/mathbf{x}}/) 的集合。
要求解一个矩阵的零空间,可以先将其化简成行最简形。例如矩阵 $/mathbf{A} = /begin{bmatrix} 1 & 1 & 1 & 1 // 1 & 2 & 3 & 4 // 4 & 3 & 2 & 1 /end{bmatrix} $,为了计算零空间,可以写出如下的等式:
/[/begin{bmatrix} 1 & 1 & 1 & 1 // 1 & 2 & 3 & 4 // 4 & 3 & 2 & 1 /end{bmatrix} /begin{bmatrix} x_1 // x_2 // x_3 // x_4 /end{bmatrix} = /begin{bmatrix} 0 // 0 // 0 /end{bmatrix}/]
展开得到如下的方程组:
/[ /left/{ /begin{eqnarray} x_1 + x_2 + x_3 + x_4 &=& 0 /// x_1 + 2x_2 + 3x_3 + 4x_4 &=& 0 /// 4x_1 + 3x_2 + 2x_4 + x_4 &=& 0 /end{eqnarray} /right. /]
参考一节里介绍的方法,先把上面的方程组表示成增广矩阵:
/[ /begin{bmatrix} 1 & 1 & 1 & 1 & 0 // 1 & 2 & 3 & 4 & 0 // 4 & 3 & 2 & 1 & 0 /end{bmatrix} /]
然后将其转换成行最简形:
/[ /begin{bmatrix} 1 & 0 & -1 & -2 & 0 // 0 & 1 & 2 & 3 & 0 // 0 & 0 & 0 & 0 & 0 /end{bmatrix} /]
最终求解得到:
/[ /begin{bmatrix} x_{ 1 } // x_{ 2 } // x_{ 3 } // x_{ 4 } /end{bmatrix}=x_{ 3 }/underbrace { /begin{bmatrix} 1 // -2 // 1 // 0 /end{bmatrix} }_{ /vec{/mathbf{a}} } +x_{ 4 }/underbrace{/begin{bmatrix} 2 // -3 // 0 // 1 /end{bmatrix}}_{/vec{/mathbf{b}}} /]
因此矩阵 /(/mathbf{A}/) 的零空间就是由上式中的 /(/vec{/mathbf{a}}/) 向量和 /(/vec{/mathbf{b}}/) 向量张成的空间。即
/[N(/mathbf{A}) = span/left(/begin{bmatrix} 1 // -2 // 1 // 0 /end{bmatrix} /begin{bmatrix} 2 // -3 // 0 // 1 /end{bmatrix}/right)/]
另外,上面得到的这个行最简形有两个自由变量,就称矩阵 /(/mathbf{A}/) 的 零度 为 2。零度等于 /(/mathbf{A}/vec{/mathbf{x}} = 0/) 化成行最简形后自由变量的个数。
零空间其实和线性无关其实有很大的联系。一个矩阵的零空间为 /(/vec{/mathbf{0}}/) 的充分必要条件是这个矩阵的所有列线性无关。
列空间
矩阵的列空间就是由每一列的向量张成的空间。对于矩阵 /(/underset { m/times n }{ /mathbf{A} } =/begin{bmatrix} /underbrace { /begin{bmatrix} a_{ 11 } // a_{ 21 } // /ldots // a_{ m1 } /end{bmatrix} }_{ /vec { /mathbf{ V }_{ 1 } } } & /underbrace { /begin{bmatrix} a_{ 12 } // a_{ 22 } ///ldots // a_{ m2 } /end{bmatrix} }_{ /vec { /mathbf{ V_{ 2 } } } } & /ldots & /underbrace { /begin{bmatrix} a_{ 1n } // a_{ 2n } // /ldots // a_{ mn } /end{bmatrix} }_{ /vec { /mathbf{ V_{ n } } } } /end{bmatrix}/),那么矩阵 /(/mathbf{A}/) 的列空间就是
/[C(/mathbf{A}) = span(/vec{v_1}, /vec{v_2}, /ldots, /vec{v_n})/]
例如,矩阵 /(/mathbf{A} = /begin{bmatrix}1 & 1 & 1 & 1 // 1 & 2 & 3 & 4 //4 & 3 & 2 & 1/end{bmatrix}/) 的列空间是 /(C(/mathbf{A}) = span/left(/begin{bmatrix}1 // 1 // 4/end{bmatrix}/begin{bmatrix}1 // 2 // 3/end{bmatrix}/begin{bmatrix}1 // 3 // 2/end{bmatrix}/begin{bmatrix}1 // 4 // 1/end{bmatrix}/right)/)
把一个矩阵化成行最简形后,这个矩阵的不相关主列(基底)的个数就称为矩阵的 秩 (Rank),或者叫维数。
例如,上面的矩阵 /(/mathbf{A}/) 化成最简形矩阵是(参考上节的化简结果):
/[ /begin{bmatrix} 1 & 0 & -1 & -2 // 0 & 1 & 2 & 3 // 0 & 0 & 0 & 0 /end{bmatrix} /]
从结果可以看出这个矩阵的主列有 2 个,而且是线性无关的。所以矩阵 /(/mathbf{A}/) 的秩为 2 ,即 /(rank(/mathbf{A}) = 2/)。
矩阵的秩有一个特性:矩阵 /(/mathbf{A}/) 的秩等于矩阵 /(/mathbf{A}/) 的转置的秩。即 /(Rank(/mathbf{A}) = Rank(/mathbf{A^T})/)
在 Python 中,可以使用 Numpy 包中的 linalg.matrix_rank 方法计算矩阵的秩:
a = np.matrix('1 1 1 1;1 2 3 4;4 3 2 1')
print np.linalg.matrix_rank(a) # 2
注意在 Numpy 中的秩和线性代数里的秩是不同的概念。在NumPy中维度(dimensions)叫做轴(axes),轴的个数叫做秩。
import numpy as np
a = np.matrix('1 1 1 1;1 2 3 4; 0 0 1 0')
print a.ndim # 2(维度)
print np.linalg.matrix_rank(a) # 3(秩)
行空间
有了列空间的定义,行空间顾名思义就是矩阵的每一行转置得到的向量张成的子空间,也就是矩阵的转置的列空间,记为 /(R(/mathbf{A}) = C(/mathbf{A}^T)/)。
例如,矩阵 /(/mathbf{A} = /begin{bmatrix}1 & 1 & 1 & 1 // 1 & 2 & 3 & 4 //4 & 3 & 2 & 1/end{bmatrix}/) 的行空间是 /(R(/mathbf{A}) = C(/mathbf{A}^T) = span/left(/begin{bmatrix}1 // 1 // 1 // 1/end{bmatrix}/begin{bmatrix}1 // 2 // 3 // 4/end{bmatrix}/begin{bmatrix}4 // 3 // 2 // 1/end{bmatrix}/right)/)。
左零空间
矩阵 /(/mathbf{A}/) 的左零空间是 /(/mathbf{A}/) 的转置的零空间。即:
/[N(/mathbf{A}^T) = /left/{ /vec{/mathbf{x}} | /mathbf{A}^{T} /vec{/mathbf{x}} = /vec{/mathbf{0}} /right/} = /left/{ /vec{/mathbf{x}} | /vec{/mathbf{x}}^{T} /mathbf{A} = /vec{/mathbf{0}}^{T} /right/}/]
例如,矩阵 /(/mathbf{B} = /begin{bmatrix}1 & 1 & 4 // 1 & 2 & 3 //1 & 4 & 2// 1 & 3 & 1/end{bmatrix}/) 的转置是矩阵 /(/mathbf{A} = /mathbf{A} = /begin{bmatrix}1 & 1 & 1 & 1 // 1 & 2 & 3 & 4 //4 & 3 & 2 & 1/end{bmatrix}/) ,因此左零空间是 /(N(/mathbf{B^T}) = N(/mathbf{A}) = span/left(/begin{bmatrix} 1 // -2 // 1 // 0 /end{bmatrix} /begin{bmatrix} 2 // -3 // 0 // 1 /end{bmatrix}/right)/)
由于转置是对称的,所以矩阵 /(/mathbf{A}/) 的转置的左零空间也是矩阵 /(/mathbf{A}/) 的零空间。
子空间的正交补
假设 /(/mathbf{V}/) 是 /(/mathbb{R}^n/) 的一个子空间,那么 /(/mathbf{V}/) 的正交补 /(/mathbf{V}^{/bot}/) 也是一个子空间,定义为 /(/left/{/vec{/mathbf{x}} | /vec{/mathbf{x}} /vec{/mathbf{v}}=0/right/}/),也即是 /(/mathbb{R}^{n}/) 中所有正交于 /(/mathbf{V}/) 的向量所组成的子空间。
由于正交是对称的,所以正交补也是对称的。一个子空间的正交补的正交补依然等于这个子空间。
矩阵的零空间是行空间的正交补,即 /(N(/mathbf{A}) = R(/mathbf{A})^{/bot}/)。反过来,矩阵的左零空间是列空间的正交补,即 /(N(/mathbf{B}^T) = C(/mathbf{B})^{/bot}/)。
最小二乘逼近
最小二乘法是一个实用的数学工具,利用它可以在方程无解的情况下给出近似解。在机器学习中,最小二乘逼近也是一个重要的拟合方法。
假设有一个方程
/[ /underset{n/times k}{/mathbf{A}}/vec{/mathbf{x}} = /vec{/mathbf{b}} /]
无解。把上式写成:
/[ /vec{a_1}/vec{/mathbf{x}} + /vec{a_2}/vec{/mathbf{x}} + /ldots + /vec{a_k}/vec{/mathbf{x}} = /vec{/mathbf{b}} /]
无解就意味着 /(/mathbf{A}/) 的所有列向量的张成空间不包括向量 /(/vec{/mathbf{b}}/) 。即 /(/vec{/mathbf{b}} /notin span(C(/mathbf{A}))/)。
我们可以通过最小二乘法求解出近似解。即是要让找出一些向量 /(/vec{/mathbf{x}^*}/) 使得 /(/left/|/vec{/mathbf{b}}-/mathbf{A}/vec{/mathbf{x}^*}/right/|/) 最小。用向量 /(/vec{/mathbf{V}}/) 代表 /(/mathbf{A}/vec{/mathbf{x}^*}/) ,有:
/[ /left/| /begin{bmatrix} /vec{b_1}-/vec{v_1}// /vec{b_2}-/vec{v_2}// /ldots// /vec{b_n}-/vec{v_n}// /end{bmatrix} /right/|^2 = (b_1-v_1)^2 + (b_2-v_2)^2 + /ldots + (b_n-v_n)^2 /]
把这个值最小化的过程就叫做 最小二乘逼近 。
如何求出 /(/mathbf{A}/vec{/mathbf{x}^*}/) 这个近似值呢?从几何上考虑,列空间可以看成空间中张成的一个平面,而向量 /(/vec{/mathbf{b}}/) 并不落在这个平面上。但我们知道,在这个平面上与向量 /(/vec{/mathbf{b}}/) 最接近的向量就是它的投影!所以,
/[ /mathbf{A}/vec{/mathbf{x}^*} = Proj_{C(/mathbf{A})}/vec{/mathbf{b}} /]
直接计算 /(Proj_{C(/mathbf{A})}/vec{/mathbf{b}}/) 并不简单。不过,/(/vec{/mathbf{b}}-/mathbf{A}/vec{/mathbf{x}}/) 其实就是 /(/mathbf{A}/vec{/mathbf{x}}/) 的正交补,所以一个简单的求解方法是将原来无解的方程左乘一个 /(/mathbf{A}/) 的转置再求解:
/[ /mathbf{A}^T/mathbf{A}/vec{/mathbf{x}^*} = /mathbf{A}^T/vec{/mathbf{b}} /]
得出的解就是原方程的近似解。
实例1:求解方程
问题:求解如下方程组
/[ /left/{ /begin{eqnarray} x + y &=& 3 /// x - y &=& -2 /// y &=& 1 /end{eqnarray} /right. /]
将三个方程表示的直线画出来,可以看出这三条直线并没有交点:
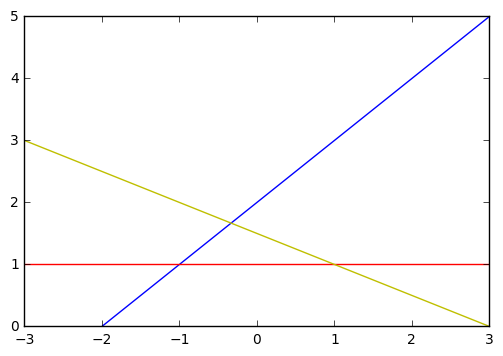
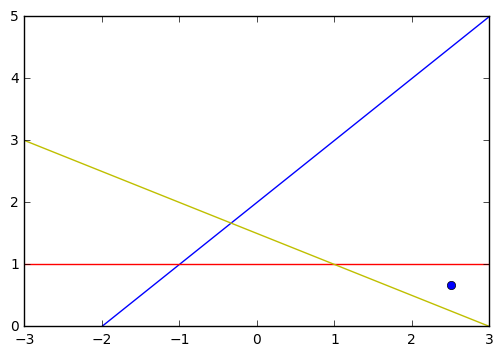
如何找出一个与三条直线距离最近的一个点呢?这时候我们的最小二乘逼近就派上用场了。
先将方程写成矩阵和向量的形式:
/[ /underbrace{ /begin{bmatrix} 1 & 1 // 1 & -1 // 0 & 1 /end{bmatrix} }_{/mathbf{A}} /underbrace{ /begin{bmatrix} x // y /end{bmatrix} }_{/vec{/mathbf{x}}} = /underbrace{ /begin{bmatrix} 3 // 2 // 1 /end{bmatrix} }_{/vec{/mathbf{b}}} /]
这个等式的最小二乘逼近就是:
/[ /begin{align} /begin{bmatrix} 1 & 1 & 0 // 1 & -1 & 1// /end{bmatrix} /begin{bmatrix} 1 & 1 // 1 & -1 // 0 & 1 /end{bmatrix} /begin{bmatrix} x^* // y^* /end{bmatrix} & = /begin{bmatrix} 1 & 1 & 0 // 1 & -1 & 1// /end{bmatrix} /begin{bmatrix} 3 // 2 // 1 /end{bmatrix} /// /begin{bmatrix} 2 & 0 // 0 & 3 /end{bmatrix} /begin{bmatrix} x^* // y^* /end{bmatrix} & = /begin{bmatrix} 5 // 2 /end{bmatrix} /end{align} /]
由于是二阶方程,可以很容易求出矩阵 /(/begin{bmatrix}2 & 0 // 0 & 3/end{bmatrix}/) 的逆是 /(/begin{bmatrix}/frac{1}{2} & 0 // 0 & /frac{1}{3}/end{bmatrix}/),所以:
/[ /begin{bmatrix} x^* // y^* /end{bmatrix} = /begin{bmatrix}/frac{1}{2} & 0 // 0 & /frac{1}{3}/end{bmatrix} /begin{bmatrix} 5 // 2 /end{bmatrix} = /begin{bmatrix} /frac{5}{2} // /frac{2}{3} /end{bmatrix} /]
因此 /(/begin{bmatrix}/frac{5}{2} ///frac{2}{3}/end{bmatrix}/) 就是方程组的近似解。
在 Python 中,可以使用 numpy.linalg.lstsq 方法来求解最小二乘逼近。
>>> a = np.array([[1, 1], [1, -1], [0, 1]]) >>> b = np.array([3, 2, 1]) >>> x = np.linalg.lstsq(a,b) >>> print x (array([ 2.5 , 0.66666667]), array([ 0.16666667]), 2, array([ 1.73205081, 1.41421356]))
numpy.linalg.lstsq 的返回包括四个部分:
- 最小二乘逼近解。如果
b是二维的,那么这个逼近的结果有多个列,每一列是一个逼近解。对于上例,逼近解就是 /(/begin{bmatrix}2.5 // 0.66666667 /end{bmatrix}/) 。 - 残差。即每一个
b - a*x的长度的和。对于上例,残差是 0.16666667 。 - 矩阵
a的秩。对于上例,矩阵a的秩为 2 。 - 矩阵
a的奇异值。对于上例,矩阵a的奇异值为 /(/begin{bmatrix}1.73205081 // 1.41421356/end{bmatrix}/)
实例2:线性回归
问题:给定4个坐标点 /((-1, 0)/), /((0, 1)/), /((1, 2)/), /((2, 1)/) ,求一条经过这些点的直线 /(y=mx+b/)。
将四个点画图如下:
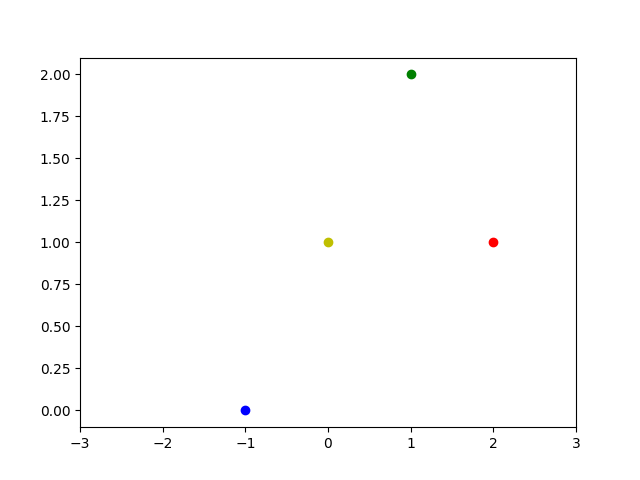
显然这样的直线并不存在。然而我们能够使用最小二乘逼近,找到一条尽可能接近这些点的直线。将四个点表示成方程组的形式:
/[ /left/{ /begin{eqnarray} f(-1) &= -m + b = 0/// f(0) &= 0 + b = 1/// f(1) &= m + b = 2/// f(2) &= 2m + b = 1 /end{eqnarray} /right. /]
还是那个套路,将方程组表示成矩阵和向量的形式:
/[ /underbrace{ /begin{bmatrix} -1 & 1 // 0 & 1 // 1 & 1 // 2 & 1 /end{bmatrix} }_{/mathbf{A}} /underbrace{ /begin{bmatrix} m// b /end{bmatrix} }_{/vec{/mathbf{x}}} = /underbrace{ /begin{bmatrix} 0// 1// 2// 1 /end{bmatrix} }_{/vec{/mathbf{b}}} /]
这个等式的最小二乘逼近就是:
/[ /begin{align} /begin{bmatrix} -1 & 0 & 1 & 2 // 1 & 1 & 1 & 1 /end{bmatrix} /begin{bmatrix} -1 & 1 // 0 & 1 // 1 & 1 // 2 & 1 /end{bmatrix} /begin{bmatrix} m^*// b^* /end{bmatrix} &= /begin{bmatrix} -1 & 0 & 1 & 2 // 1 & 1 & 1 & 1 /end{bmatrix} /begin{bmatrix} 0// 1// 2// 1 /end{bmatrix}/// /begin{bmatrix} 6 & 2 // 2 & 4 /end{bmatrix} /begin{bmatrix} m^*// b^* /end{bmatrix} &= /begin{bmatrix} 4// 4 /end{bmatrix} /end{align} /]
容易求得 /(/begin{bmatrix}6 & 2//2 & 4/end{bmatrix}/) 的逆为 /(/frac{1}{20}/begin{bmatrix}4 & -2//-2 & 6/end{bmatrix}/),因此
/[/begin{bmatrix}m^*//b^*/end{bmatrix} = /frac{1}{20}/begin{bmatrix}4 & -2//-2 & 6/end{bmatrix}/begin{bmatrix}4 // 4/end{bmatrix} = /frac{1}{20}/begin{bmatrix}8 // 16/end{bmatrix} = /begin{bmatrix}/frac{2}{5} // /frac{4}{5}/end{bmatrix}/]
将直线 /(y = /frac{2}{5}x + /frac{4}{5}/) 绘图如下所示:
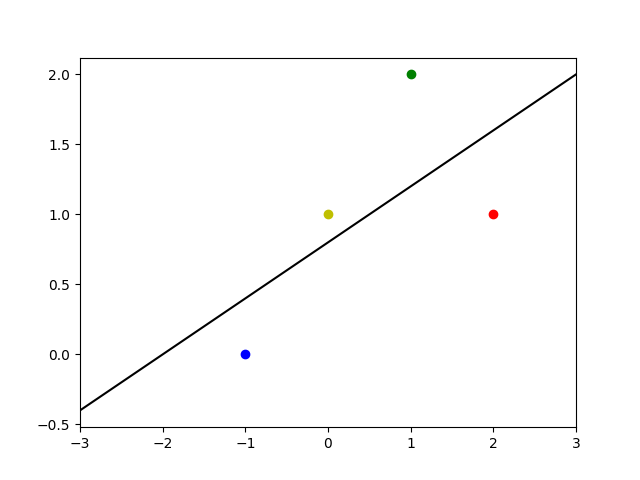
这就是所求的直线的近似解。
Python 示例如下:
>>> a = np.matrix('-1 1;0 1;1 1;2 1')
>>> b = np.array([0, 1, 2, 1])
>>> x = np.linalg.lstsq(a, b)
>>> print x
(array([ 0.4, 0.8]), array([ 1.2]), 2, array([ 2.68999405, 1.66250775]))
特征向量
“特征”在模式识别和图像处理中是非常常见的一个词汇。我们要认识和描绘一件事物,首先得找出这个事物的特征。同样的道理,要让计算机识别一件事物,首先就要让计算机学会理解或者抽象出事物的特征。什么样的东西能当成特征呢?那必须是能“放之四海皆准”的依据,不论个体如何变换,都能从中找到这类群体共有的特点。例如,计算机视觉中常用的SIFT 特征点 是一种很经典的用于视觉跟踪的特征点,即使被跟踪的物体的尺度、角度发生了变化,这种特征点依然能够找到关联。在机器学习中, 特征向量选取也是整个机器学习系统中非常重要的一步。
在线性代数中,“特征” 就是一种更抽象的描述。我们知道,矩阵乘法对应了一个变换,是把任意一个向量变成另一个方向或长度都大多不同的新向量。在这个变换的过程中,原向量主要发生旋转、伸缩的变化。如果矩阵对某一个向量或某些向量只发生伸缩(尺度)变换,而没有产生旋转的效果(也就意味着张成的子空间没有发生改变),这样的向量就认为是特征向量。
/[/mathbf{T}(/vec{/mathbf{v}}) = /underbrace{/mathbf{A}}_{n/times n}/vec{/mathbf{v}} = /underbrace{/lambda}_{特征值} /overbrace{/vec{/mathbf{v}}}^{特征向量}/]
其中, /(T/) 是一种线性变换,我们知道线性变换可以用矩阵向量积来表示,因此可以表示成 /mathbf{A}/vec{/mathbf{v}}。/(/mathbf{A}/) 是一个 /(n/times n/) 的方阵。/(/vec{/mathbf{v}}/) 就是特征向量(Eigen Vector),也就是 能被伸缩的向量
(要求是非 /(/mathbf{0}/) 向量),而 /(/lambda/) 是特征向量 /(/vec{/mathbf{v}}/) 所对应的特征值,也就是 伸缩了多少
。如果特征值是负数,那说明了矩阵不但把向量拉长(缩短)了,而且让向量指向了相反的方向。
简而言之,特征向量就是在线性变化当中不变的向量。
听起来很抽象,放个例子就清楚了。下图出自 wikipedia的《 特征向量 》一文:
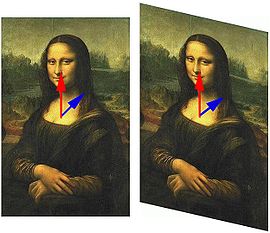
在这个仿射变换中,蒙娜丽莎的图像被变形,但是中心的纵轴在变换下保持不变。(注意:角落在右边的图像中被裁掉了。)蓝色的向量,从胸部到肩膀,其方向改变了,但是红色的向量,从胸部到下巴,其方向不变。因此红色向量是该变换的一个特征向量,而蓝色的不是。因为红色向量既没有被拉伸又没有被压缩,其特征值为1。所有沿着垂直线的向量也都是特征向量,它们的特征值相等。它们构成这个特征值的特征空间。
求解特征值
非 /(/mathbf{0}/) 向量 /(/vec{/mathbf{v}}/) 是线性变化矩阵 /(/mathbf{A}/) 的特征向量,需要满足如下条件
eq: 1 »
:
/[det(/lambda /mathbf{I}_n - /underbrace{/mathbf{A}}_{n/times n}) = 0/]
其中,/(det/) 表示矩阵行列式,/(/lambda/) 是特征值,/(/mathbf{I}/) 是单位矩阵。
例如矩阵 /(/mathbf{A} = /begin{bmatrix}1 & 2 // 4 & 3/end{bmatrix}/) ,代入公式 2 得:
/[ /begin{align} det/left( /lambda /begin{bmatrix} 1 & 0 // 0 & 1 /end{bmatrix}-/begin{bmatrix} 1 & 2 // 4 & 3 /end{bmatrix} /right) &=0 // det/left( /begin{bmatrix} /lambda & 0 // 0 & /lambda /end{bmatrix}-/begin{bmatrix} 1 & 2 // 4 & 3 /end{bmatrix} /right) &=0 // det/left( /begin{bmatrix} /lambda -1 & -2 // -4 & /lambda -3 /end{bmatrix} /right) &=0 /end{align} /]
所以有:
/[/begin{align} (/lambda -1)(/lambda -3)-8 & =0 // /lambda ^{ 2 }-4/lambda -5 &=0 // (/lambda - 5)(/lambda +1) &= 0/end{align}/]
因此 /(/lambda/) 的值为 5 或者 -1 。
在 Python 中,可以使用 numpy.linalg.eigvals 方法求解一个方阵的特征值:
>>> a = np.matrix('1 2;4 3')
>>> print np.linalg.eigvals(a)
[-1. 5.]
前面说了变换矩阵必须是方阵,所以如果用在其他形状的矩阵上就会抛出 LinAlgError 错误:
>>> b = np.matrix('1 2 3;4 3 1')
>>> print np.linalg.eigvals(b)
Traceback (most recent call last):
File "<stdin>", line 1, in <module>
File "/usr/local/lib/python2.7/dist-packages/numpy/linalg/linalg.py", line 902, in eigvals
_assertNdSquareness(a)
File "/usr/local/lib/python2.7/dist-packages/numpy/linalg/linalg.py", line 212, in _assertNdSquareness
raise LinAlgError('Last 2 dimensions of the array must be square')
numpy.linalg.linalg.LinAlgError: Last 2 dimensions of the array must be square
求解特征向量
变换矩阵 /(/mathbf{A}/) 的特征空间(特征向量张成的空间)可以用下面的等式来求解:
eq: 2 »
/[/mathbf{E}_{/lambda}=N(/lambda I_n - /mathbf{A})/]
例如上面的变换矩阵 /(/mathbf{A} = /begin{bmatrix}1 & 2 // 4 & 3/end{bmatrix}/) ,代入公式 3 得:
/[{ E }_{ /lambda }=N/left( /lambda I_{ n }-/begin{bmatrix} 1 & 2 // 4 & 3 /end{bmatrix} /right) =N/left( /lambda /begin{bmatrix} 1 & 0 // 0 & 1 /end{bmatrix}-/begin{bmatrix} 1 & 2 // 4 & 3 /end{bmatrix} /right) =N/left( /begin{bmatrix} /lambda -1 & -2 // -4 & /lambda -3 /end{bmatrix} /right) /]
当 /(/lambda = 5/) 时,
/[{ E }_{ 5 }=N/left( /begin{bmatrix} 4 & -2 // -4 & 2 /end{bmatrix} /right) /]
利用前面所学的,得
/[{ E }_{ 5 }= span/left(/begin{bmatrix}/frac{1}{2} // 1 /end{bmatrix}/right) /]
同样地,当 /(/lambda = -1/) 时,
/[{ E }_{ -1 }= span/left(/begin{bmatrix}1 // -1 /end{bmatrix}/right) /]
在 Python 中,可以使用 numpy.linalg.eig 方法来求解方阵的特征值和特征向量:
>>> a = np.matrix('1 2;4 3')
>>> print np.linalg.eig(a)
(array([-1., 5.]), matrix([[-0.70710678, -0.4472136 ],
[ 0.70710678, -0.89442719]]))
得到的元组中,第一部分是特征值,和前面使用 numpy.linalg.eigvals 得到的结果完全一样;第二部分是特征向量,乍一看好像和我们上面求解的结果不一样,但如果我们这么写就完全一样了:/(/begin{bmatrix}-0.70710678/begin{bmatrix}1 // -1/end{bmatrix} & -0.89442719/begin{bmatrix}/frac{1}{2} // 1/end{bmatrix} /end{bmatrix}/)
变换矩阵线性无关的特征向量特别适合作为空间的基,因为在这些方向上变换矩阵可以拉伸向量而不必扭曲和旋转它,使得计算大为简单。我们把这种基称为 特征基 。
小结
终于完成了线性代数的系列。作为保研党,真正系统学习线性代数也就是在大一的时期,然后大学四年也没怎么用到数学,渐渐地就忘得差不多了。后来读研的时候虽然也用到些线性代数,但都是用到啥补啥,跟其他考研上来的同学比起来,心里面总是缺少一点底气。在中科院实习结束的时候,陈宝权老师和 Andrei 一直劝我读博,最后我婉拒了,其中一个原因也和这个“没底气”有关吧。而今我也工作快两年了,虽然还是没有读博的念头,但还是希望把数学捡起来,让自己也有底气一些。
读者也许会发现最近我很喜欢写系列文章。我倒不是为了要出书啦。只是我觉得既然博客的文章不止是写给我一个人看的,那么也得考虑读者的感受。如果把一篇文章写得太长,那就很难让人坚持读完,更别说这种公式很多的文章了;而如果写得太短,又不够完整,读得不够尽兴,于我也没有多少益处。
写系列文章其实最大的难点在于把握好 tradeoff 。像线性代数的知识点,两三篇文章的篇幅肯定是讲不完的,有些知识点如果再深入一下,就又拔出萝卜带出泥。比如最后一节提到特征向量,其实我还可以继续讨论特征值分解,然后又可以扯到奇异值分解。这样就很容易把整个系列写成像裹脚布一样了。所以,我只讲最基础的知识点,而且是可能对机器学习有帮助的,目的是让自己今后读相关的文章时有底气一些,至少不会在“秩”、“转置矩阵”这种最基础的知识点上犯晕。有了这个基础后,再去学习像奇异值分解之类的其他知识也会轻松很多。如果这个系列也能对读者们有所帮助,那就再好不过了。
如果您希望将这个线性代数子系列保存为书签,作为后面的工具文来查阅,我建议您保存我在wiki上的线性代数笔记(跳转入口)。因为我的 wiki 的更新频率会更频繁一些。且日后随着我的学习还可能继续添加一些新的内容。
下篇文章我将继续从一个机器学习工程师的角度,开始回顾微积分的基础知识点。
正文到此结束
热门推荐









相关文章






Loading...
![[HBLOG]公众号](https://www.liuhaihua.cn/img/qrcode_gzh.jpg)

