Docker、Containerd、RunC...:你应该知道的所有
从 Docker 1.11 开始,Docker容器运行已经不是简单的通过Docker daemon来启动,而是集成了containerd、runC等多个组件。Docker服务启动之后,我们也可以看见系统上启动了dockerd、docker-containerd等进程,本文主要介绍新版Docker(1.11以后)每个部分的功能和作用。
Docker Daemon
作为Docker容器管理的守护进程,Docker Daemon从最初集成在 docker 命令中(1.11版本前),到后来的独立成单独二进制程序(1.11版本开始),其功能正在逐渐拆分细化,被分配到各个单独的模块中去。从Docker服务的启动脚本,也能看见守护进程的逐渐剥离:
在Docker 1.8之前,Docker守护进程启动的命令为:
docker -d
这个阶段,守护进程看上去只是Docker client的一个选项。
Docker 1.8开始,启动命令变成了:
docker daemon
这个阶段,守护进程看上去是 docker 命令的一个模块。
Docker 1.11开始,守护进程启动命令变成了:
dockerd
此时已经和Docker client分离,独立成一个二进制程序了。
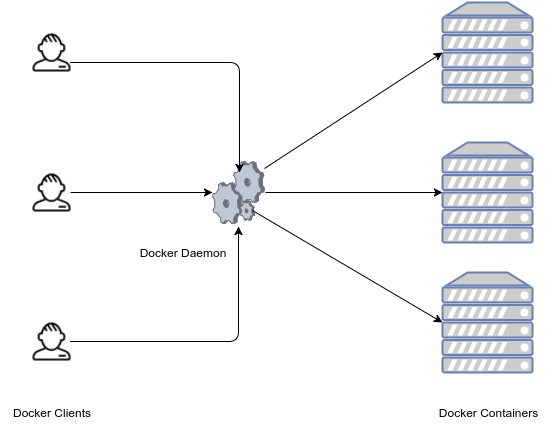
当然,守护进程模块不停的在重构,其基本功能和定位没有变化。和一般的CS架构系统一样,守护进程负责和Docker client交互,并管理Docker镜像、容器。
下面就来介绍下独立分拆出来的其他几个模块。
Containerd
containerd 是容器技术标准化之后的产物,为了能够兼容 OCI标准 ,将容器运行时及其管理功能从Docker Daemon剥离。理论上,即使不运行dockerd,也能够直接通过containerd来管理容器。(当然,containerd本身也只是一个守护进程,容器的实际运行时由后面介绍的runC控制。)
最近,Docker刚刚宣布开源containerd。从其项目 介绍页面 可以看出,containerd主要职责是镜像管理(镜像、元信息等)、容器执行(调用最终运行时组件执行)。
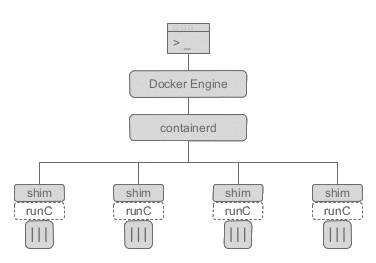
containerd向上为Docker Daemon提供了gRPC接口,使得Docker Daemon屏蔽下面的结构变化,确保原有接口向下兼容。向下通过containerd-shim结合runC,使得引擎可以独立升级,避免之前Docker Daemon升级会导致所有容器不可用的问题。
Docker、containerd和containerd-shim之间的关系,可以通过启动一个Docker容器,观察进程之间的关联。首先启动一个容器,
docker run -d busybox sleep 1000
然后通过 pstree 命令查看进程之间的父子关系(其中20708是 dockerd 的PID):
pstree -l -a -A 20708
输出结果如下:
dockerd -H fd:// --storage-driver=overlay2 |-docker-containe -l unix:///var/run/docker/libcontainerd/docker-containerd.sock --metrics-interval=0 --start-timeout 2m --state-dir /var/run/docker/libcontainerd/containerd --shim docker-containerd-shim --runtime docker-runc | |-docker-containe b9a04a582b66206492d29444b5b7bc6ec9cf1eb83eff580fe43a039ad556e223 /var/run/docker/libcontainerd/b9a04a582b66206492d29444b5b7bc6ec9cf1eb83eff580fe43a039ad556e223 docker-runc | | |-sleep 1000
虽然 pstree 命令截断了命令,但我们还是能够看出,当Docker daemon启动之后,dockerd和docker-containerd进程一直存在。当启动容器之后,docker-containerd进程(也是这里介绍的containerd组件)会创建docker-containerd-shim进程,其中的参数b9a04a582b66206492d29444b5b7bc6ec9cf1eb83eff580fe43a039ad556e223就是要启动容器的id。最后docker-containerd-shim子进程,已经是实际在容器中运行的进程(既sleep 1000)。
docker-containerd-shim另一个参数,是一个和容器相关的目录/var/run/docker/libcontainerd/b9a04a582b66206492d29444b5b7bc6ec9cf1eb83eff580fe43a039ad556e223,里面的内容有:
. ├── config.json ├── init-stderr ├── init-stdin └── init-stdout
其中包括了容器配置和标准输入、标准输出、标准错误三个管道文件。
RunC
OCI定义了容器运行时标准,runC是Docker按照开放容器格式标准(OCF, Open Container Format)制定的一种具体实现。
runC是从Docker的libcontainer中迁移而来的,实现了容器启停、资源隔离等功能。Docker默认提供了docker-runc实现,事实上,通过containerd的封装,可以在Docker Daemon启动的时候指定runc的实现。
我们可以通过启动Docker Daemon时增加 --add-runtime 参数来选择其他的runC现。例如:
docker daemon --add-runtime "custom=/usr/local/bin/my-runc-replacement"
下面就让我们看下这几个模块如何工作。
举个例子
这里通过Docker一些命令,实现不使用Docker Daemon直接启动一个镜像,以便了解Docker Daemon每个模块的作用。
首先,需要创建容器标准包,这部分实际上由containerd的bundle模块实现,将Docker镜像转换成容器标准包。
mkdir my_container cd my_container mkdir rootfs docker export $(docker create busybox) | tar -C rootfs -xvf -
上述命令将busybox镜像解压缩到指定的rootfs目录中。如果本地不存在busybox镜像,containerd还会通过distribution模块去远程仓库拉取。
现在整个my_container目录结构如下:
$ tree -d my_container/
my_container/
└── rootfs
├── bin
├── dev
│ ├── pts
│ └── shm
├── etc
├── home
├── proc
├── root
├── sys
├── tmp
├── usr
│ └── sbin
└── var
├── spool
│ └── mail
└── www
17 directories
此时,标准包所需的容器数据已经准备完毕,接下来我们需要创建配置文件:
docker-runc spec
此时会生成一个名为 config.json 的配置文件,该文件和Docker容器的配置文件类似,主要包含容器挂载信息、平台信息、进程信息等容器启动依赖的所有数据。
最后,可以通过 runc 命令来启动容器:
runc run busybox
注意,runc必须使用root权限启动。
执行之后,我们可以看见容器已经启动:
localhost my_container # runc run busybox
/ # ps aux
PID USER TIME COMMAND
1 root 0:00 sh
9 root 0:00 ps aux
此时,事实上已经可以不依赖Docker本身,如果系统上安装了 runc 包,即可运行容器。对于Gentoo系统来说,安装 app-emulation/runc 包即可。
当然,也可以使用docker-runc命令来启动容器:
localhost my_container # docker-runc run busybox
/ # ps aux
PID USER TIME COMMAND
1 root 0:00 sh
7 root 0:00 ps aux
从这里可以看到标准化的重要性。
总结
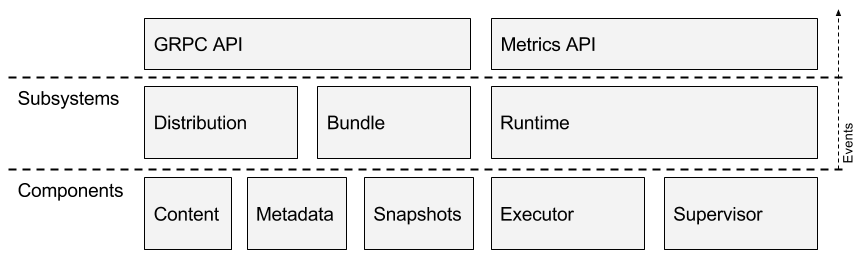
从Docker 1.11之后,Docker Daemon被分成了多个模块以适应OCI标准。拆分之后,结构分成了以下几个部分。
其中,containerd独立负责容器运行时和生命周期(如创建、启动、停止、中止、信号处理、删除等),其他一些如镜像构建、卷管理、日志等由Docker Daemon的其他模块处理。
Docker的模块块拥抱了开放标准,希望通过OCI的标准化,容器技术能够有很快的发展。
感谢木环对本文的审校。
给InfoQ中文站投稿或者参与内容翻译工作,请邮件至editors@cn.infoq.com。也欢迎大家通过新浪微博(@InfoQ,@丁晓昀),微信(微信号: InfoQChina )关注我们。
正文到此结束
热门推荐










相关文章






Loading...
![[HBLOG]公众号](https://www.liuhaihua.cn/img/qrcode_gzh.jpg)

