Java 线程同步原理探析
现如今,服务器性能日益增长,并发(concurrency)编程已经“深入人心”,但由于冯诺依式计算机“指令存储,顺序执行”的特性,使得编写跨越时间维度的并发程序异常困难,所以现代编程语言都对并发编程提供了一定程度的支持,像 Golang 里面的 Goroutines 、Clojure 里面的 STM(Software Transactional Memory) 、Erlang 里面的 Actor 。
Java 对于并发编程的解决方案是多线程(Multi-threaded programming),而且 Java 中的线程 与 native 线程一一对应,多线程也是早期操作系统支持并发的方案之一(其他方案:多进程、IO多路复用)。
在 Java 1.5 版本中,引入 JUC 并发编程辅助包,很大程度上降低了并发编程的门槛,JUC 里面主要包括:线程调度的 Executors、缓冲任务的 Queues、时间相关的 TimeUnit、并发集合(如 ConcurrentHashMap) 与线程同步类(Synchronizers,如 CountDownLatch ),其中最重要也是最核心的是线程同步机制,因为并发编程的难点就在于如何保证「共享区域(专业术语:临界区,Critical Section)的访问时序问题」。
本文着重介绍 Java 中线程同步的原理、实现机制,通过了解这些原理,可以让大家更好使用 JUC 提供的同步类,部分原理参考 openjdk8 源码 。阅读本文需要对 CyclicBarrier、CountDownLatch 有基本的使用经验。
AbstractQueuedSynchronizer
JUC 提供的同步类主要有如下几种:
Semaphore CountDownLatch CyclicBarrier Phaser Exchanger
通过阅读其源码可以发现,其实现都基于 AbstractQueuedSynchronizer 这个抽象类(一般简写 AQS),正如其 javadoc 开头所说:
Provides a framework for implementing blocking locks and related synchronizers (semaphores, events, etc) that rely on first-in-first-out (FIFO) wait queues. This class is designed to be a useful basis for most kinds of synchronizers that rely on a single atomic int value to represent state.
也就是说,AQS 通过维护内部的 FIFO 队列和具备原子更新的整型 state 这两个属性来实现各种锁机制,包括:是否公平,是否可重入,是否共享,是否可中断(interrupt),并在这基础上,提供了更方便实用的同步类,也就是一开始提及的 Latch、Barrier 等。
这里暂时不去介绍 AQS 实现细节(挖个坑),感兴趣的可以移步美团的一篇文章 《不可不说的Java“锁”事》 第六部分“独享锁 VS 共享锁”。
在学习 Java 线程同步这一块时,对我来说困扰最大的是「线程唤醒」,试想一个已经“睡着的”线程,是如何响应 interrupt 的呢?当调用 Object.wait() 或 lock.lock() 时,JVM 究竟做了什么事情能够在调用 Object.notify 或 lock.unlock 时重新激活相应线程?
带着上面的问题,我们从源码中寻找答案。
Java 如何实现堵塞、通知
wait/notify
public final native void wait(long timeout) throws InterruptedException; public final native void notify();
在 JDK 源码中,上述两个方法均用 native 实现(即 cpp 代码),追踪相关代码
// java.base/share/native/libjava/Object.c
static JNINativeMethod methods[] = {
{"hashCode", "()I", (void *)&JVM_IHashCode},
{"wait", "(J)V", (void *)&JVM_MonitorWait},
{"notify", "()V", (void *)&JVM_MonitorNotify},
{"notifyAll", "()V", (void *)&JVM_MonitorNotifyAll},
{"clone", "()Ljava/lang/Object;", (void *)&JVM_Clone},
};
通过上面的 cpp 代码,我们大概能猜出 JVM 是使用 monitor 来实现的 wait/notify 机制,至于这里的 monitor 是何种机制,这里暂时跳过,接着看 lock 相关实现
lock/unlock
LockSupport 是用来实现堵塞语义模型的基础辅助类,主要有两个方法:park 与 unpark。(在英文中,park 除了“公园”含义外,还有“停车”的意思)
// LockSupport.java
public static void unpark(Thread thread) {
if (thread != null)
UNSAFE.unpark(thread);
}
public static void park(Object blocker) {
Thread t = Thread.currentThread();
setBlocker(t, blocker);
UNSAFE.park(false, 0L);
setBlocker(t, null);
}
// Unsafe.java
/**
* Unblocks the given thread blocked on {@code park}, or, if it is
* not blocked, causes the subsequent call to {@code park} not to
* block. Note: this operation is "unsafe" solely because the
* caller must somehow ensure that the thread has not been
* destroyed. Nothing special is usually required to ensure this
* when called from Java (in which there will ordinarily be a live
* reference to the thread) but this is not nearly-automatically
* so when calling from native code.
*
* @param thread the thread to unpark.
*/
@HotSpotIntrinsicCandidate
public native void unpark(Object thread);
/**
* Blocks current thread, returning when a balancing
* {@code unpark} occurs, or a balancing {@code unpark} has
* already occurred, or the thread is interrupted, or, if not
* absolute and time is not zero, the given time nanoseconds have
* elapsed, or if absolute, the given deadline in milliseconds
* since Epoch has passed, or spuriously (i.e., returning for no
* "reason"). Note: This operation is in the Unsafe class only
* because {@code unpark} is, so it would be strange to place it
* elsewhere.
*/
@HotSpotIntrinsicCandidate
public native void park(boolean isAbsolute, long time);
// hotspot/share/prims/unsafe.cpp
UNSAFE_ENTRY(void, Unsafe_Park(JNIEnv *env, jobject unsafe, jboolean isAbsolute, jlong time)) {
HOTSPOT_THREAD_PARK_BEGIN((uintptr_t) thread->parker(), (int) isAbsolute, time);
EventThreadPark event;
JavaThreadParkedState jtps(thread, time != 0);
thread->parker()->park(isAbsolute != 0, time);
if (event.should_commit()) {
post_thread_park_event(&event, thread->current_park_blocker(), time);
}
HOTSPOT_THREAD_PARK_END((uintptr_t) thread->parker());
} UNSAFE_END
通过上述 unsafe.cpp 可以看到每个 thread 都会有一个 Parker 对象,所以我们需要查看 parker 对象的定义
// hotspot/share/runtime/park.hpp
class Parker : public os::PlatformParker
...
public:
// For simplicity of interface with Java, all forms of park (indefinite,
// relative, and absolute) are multiplexed into one call.
void park(bool isAbsolute, jlong time);
void unpark();
// hotspot/os/posix/os_posix.hpp
class PlatformParker : public CHeapObj<mtInternal> {
protected:
enum {
REL_INDEX = 0,
ABS_INDEX = 1
};
int _cur_index; // which cond is in use: -1, 0, 1
pthread_mutex_t _mutex[1];
pthread_cond_t _cond[2]; // one for relative times and one for absolute
...
};
看到这里大概就能知道 park 是使用 pthread_mutex_t 与 pthread_cond_t 实现。好了,到目前为止,就引出了 Java 中与堵塞相关的实现,不难想象,都是依赖底层操作系统的功能。
OS 支持的同步原语
Semaphore
并发编程领域的先锋人物 Edsger Dijkstra(没错,也是最短路径算法的作者)在 1965 年首次提出了信号量( Semaphores) 这一概念来解决线程同步的问题。信号量是一种特殊的变量类型,为非负整数,只有两个特殊操作PV:
- P(s) 如果 s!=0,将 s-1;否则将当前线程挂起,直到 s 变为非零
- V(s) 将 s+1,如果有线程堵塞在 P 操作等待 s 变成非零,那么 V 操作会重启这些线程中的任意一个
注:Dijkstra 为荷兰人,名字 P 和 V 来源于荷兰单词 Proberen(测试)和Verhogen(增加),为方便理解,后文会用 Wait 与 Signal 来表示。
struct semaphore {
int val;
thread_list waiting; // List of threads waiting for semaphore
}
wait(semaphore Sem): // Wait until > 0 then decrement
// 这里用的是 while 而不是 if
// 这是因为在 wait 过程中,其他线程还可能继续调用 wait
while (Sem.val <= 0) {
add this thread to Sem.waiting;
block(this thread);
}
Sem.val = Sem.val - 1;
return;
signal(semaphore Sem):// Increment value and wake up next thread
Sem.val = Sem.val + 1;
if (Sem.waiting is nonempty) {
remove a thread T from Sem.waiting;
wakeup(T);
}
有两点注意事项:
- wait 中的「测试和减 1 操作」,signal 中的「加 1 操作」需要保证原子性。一般来说是使用硬件支持的 read-modify-write 原语 ,比如 test-and-set/fetch-and-add/compare-and-swap,除了硬件支持外,还可以用 busy wait 的软件方式来模拟。
- signal 中没有定义重新启动的线程顺序,也即多个线程在等待同一信号量时,无法预测重启哪一个线程
使用场景
信号量为控制并发程序的执行提供了强有力工具,这里列举两个场景:
互斥
信号量提供了了一种很方便的方法来保证对共享变量的互斥访问,基本思想是
将每个共享变量(或一组相关的共享变量)与一个信号量 s (初始化为1)联系起来,然后用 wait/signal 操作将相应的临界区包围起来。
二元信号量也被称为互斥锁(mutex,mutual exclusve, 也称为 binary semaphore),wait 操作相当于加锁,signal 相当于解锁。
一个被用作一组可用资源的计数器的信号量称为计数信号量(counting semaphore)
调度共享资源
除了互斥外,信号量的另一个重要作用是调度对共享资源的访问,比较经典的案例是生产者消费者,伪代码如下:
emptySem = N
fullSem = 0
// Producer
while(whatever) {
locally generate item
wait(emptySem)
fill empty buffer with item
signal(fullSem)
}
// Consumer
while(whatever) {
wait(fullSem)
get item from full buffer
signal(emptySem)
use item
}
POSIX 实现
POSIX 标准中有定义信号量相关的逻辑,在 semaphore.h 中,为 sem_t 类型,相关 API:
// Intialize: sem_init(&theSem, 0, initialVal); // Wait: sem_wait(&theSem); // Signal: sem_post(&theSem); // Get the current value of the semaphore: sem_getvalue(&theSem, &result);
信号量主要有两个缺点:
- Lack of structure,在设计大型系统时,很难保证 wait/signal 能以正确的顺序成对出现,顺序与成对缺一不可,否则就会出现死锁!
- Global visiblity,一旦程序出现死锁,整个程序都需要去检查
解决上述两个缺点的新方案是 监控器(monitor) 。
Monitors
C. A. R. Hoare 在 1974 年的论文 Monitors: an operating system structuring concept 首次提出了「监控器」概念,它提供了对信号量互斥和调度能力的更高级别的抽象,使用起来更加方便,一般形式如下:
monitor1 . . . monitorM process1 . . . processN
我们可以认为监控器是这么一个对象:
- 所有访问同一监控器的线程通过条件变量(condition variables)间接通信
- 某一个时刻,只能有一个线程访问监控器
Condition variables
上面提到监控器通过条件变量(简写 cv)来协调线程间的通信,那么条件变量是什么呢?它其实是一个 FIFO 的队列,用来保存那些因等待某些条件成立而被堵塞的线程,对于一个条件变量 c 来说,会关联一个断言(assertion) P。当线程在等待 P 成立时,该线程不会占据该监控器,这样其他线程就能够进入监控器,修改监控器状态;在 P 成立时,其他线程会通知堵塞的线程,因此条件变量上主要有三个操作:
-
wait(cv, m)等待 cv 成立,m 表示与监控器关联的一 mutex 锁 -
signal(cv)也称为notify(cv)用来通知 cv 成立,这时会唤醒等待的线程中的一个执行。根据唤醒策略,监控器分为两类:Hoare vs. Mesa,后面会介绍区别 -
broadcast(cv)也称为notifyAll(cv)唤醒所有等待 cv 成立的线程
是一个备具以下特点的对象:
- 数据封装,可认为属性均为 private
- 能够提供互斥
- 能通知其他线程它们在等待的条件已经成立的对象
POSIX 实现
在 pthreads 中,条件变量的类型是 pthread_cond_t ,主要有如下几个方法:
// initialize pthread_cond_init() pthread_cond_wait(&theCV, &someLock); pthread_cond_signal(&theCV); pthread_cond_broadcast(&theCV);
使用方式
在 pthreads 中,所有使用条件变量的地方都必须用一个 mutex 锁起来,这是为什么呢?看下面一个例子:
pthread_mutex_t myLock;
pthread_cond_t myCV;
int count = 0;
// Thread A
pthread_mutex_lock(&myLock);
while(count < 0) {
pthread_cond_wait(&myCV, &myLock);
}
pthread_mutex_unlock(&myLock);
// Thread B
pthread_mutex_lock(&myLock);
count ++;
while(count == 10) {
pthread_cond_signal(&myCV);
}
pthread_mutex_unlock(&myLock);
如果没有锁,那么
- 线程 A 可能会在其他线程将 count 赋值为10后继续等待
- 线程 B 无法保证加一操作与测试 count 是否为零 的原子性
这里的关键点是,在进行条件变量的 wait 时,会释放该锁,以保证其他线程能够将之唤醒。不过需要注意的是,在线程 B 通知(signal) myCV 时,线程 A 无法立刻恢复执行,这是因为 myLock 这个锁还被线程 B 持有,只有在线程 B unlock(&myLock) 后,线程 A 才可恢复。总结一下:
- wait 时会释放锁
- signal 会唤醒等待同一 cv 的线程
- 被唤醒的线程需要重新获取锁,然后才能从 wait 中返回
Hoare vs. Mesa 监控器语义
在上面条件变量中,我们提到 signal 在调用时,回去唤醒等待同一 cv 的线程,根据唤醒策略的不同,监控器也分为两类:
- Hoare 监控器(1974),最早的监控器实现,在调用 signal 后,会立刻运行等待的线程,这时调用 signal 的线程会被堵塞(因为锁被等待线程占有了)
- Mesa 监控器(Xerox PARC, 1980),signal 会把等待的线程重新放回到监控的 ready 队列中,同时调用 signal 的线程继续执行。这种方式是现如今 pthreads/Java/C# 采用的
这两类监控器的关键区别在于等待线程被唤醒时,需要重新检查 P 是否成立。
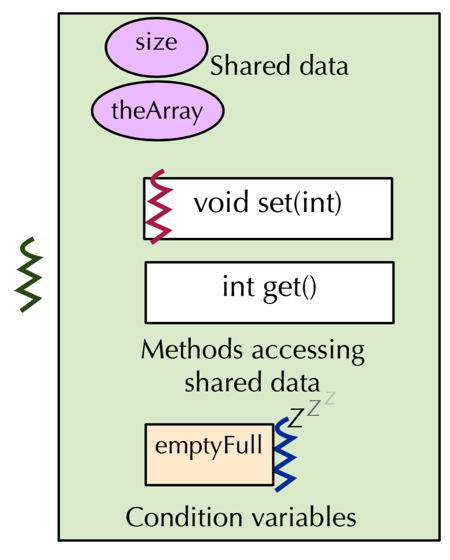
上图表示蓝色的线程在调用监控器的 get 方式时,数据为空,因此开始等待 emptyFull 条件;紧接着,红色线程调用监控器的 set 方法改变 emptyFull 条件,这时
- 按照 Hoare 思路,蓝色线程会立刻执行,并且红色线程堵塞
- 按照 Mesa 思路,红色线程会继续执行,蓝色线程会重新与绿色线程竞争与监控器关联的锁
Java 中的监控器
在 Java 中,每个对象都是一个监控器(因此具备一个 lock 与 cv),调用对象 o 的 synchronized 方法 m 时,会首先去获取 o 的锁,除此之外,还可以调用 o 的 wait/notify/notify 方法进行并发控制
Big Picture
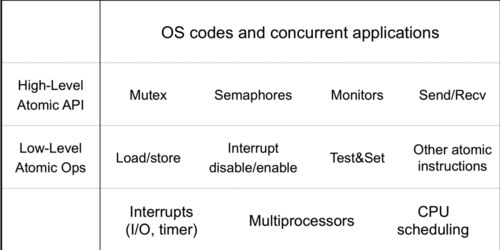 来源: https://www.cs.princeton.edu/courses/archive/fall11/cos318/lectures/L8_SemaphoreMonitor_v2.pdf
来源: https://www.cs.princeton.edu/courses/archive/fall11/cos318/lectures/L8_SemaphoreMonitor_v2.pdf
Interruptible
通过介绍操作系统支持的同步原语,我们知道了 park/unpark、wait/notify 其实就是利用信号量( pthread_mutex_t )、条件变量( pthread_cond_t )实现的,其实监控器也可以用信号量来实现。在查看 AQS 中,发现有这么一个属性:
/** * The number of nanoseconds for which it is faster to spin * rather than to use timed park. A rough estimate suffices * to improve responsiveness with very short timeouts. */ static final long spinForTimeoutThreshold = 1000L;
也就是说,在小于 1000 纳秒时,await 条件变量 P 时,会使用一个循环来代替条件变量的堵塞与唤醒,这是由于堵塞与唤醒本身的操作开销可能就远大于 await 的 timeout。相关代码:
// AQS 的 doAcquireNanos 方法节选
for (;;) {
final Node p = node.predecessor();
if (p == head && tryAcquire(arg)) {
setHead(node);
p.next = null; // help GC
failed = false;
return true;
}
nanosTimeout = deadline - System.nanoTime();
if (nanosTimeout <= 0L)
return false;
if (shouldParkAfterFailedAcquire(p, node) &&
nanosTimeout > spinForTimeoutThreshold)
LockSupport.parkNanos(this, nanosTimeout);
if (Thread.interrupted())
throw new InterruptedException();
}
在 JUC 提供的高级同步类中,acquire 对于 park,release 对应 unpark,interrupt 其实就是个布尔的 flag 位,在 unpark 被唤醒时,检查该 flag 是否为 true,则会抛出我们熟悉的 InterruptedException。
Selector.select() 相应中断异常的逻辑有些特别,因为对于这类堵塞 IO 操作来说,没有条件变量的堵塞唤醒机制,我们可以再看下 Thread.interrupt 的实现
public void interrupt() {
if (this != Thread.currentThread())
checkAccess();
synchronized (blockerLock) {
Interruptible b = blocker;
if (b != null) {
interrupt0(); // Just to set the interrupt flag
b.interrupt(this);
return;
}
}
interrupt0();
}
OpenJDK 使用了这么一个技巧来实现堵塞 IO 的中断唤醒,在一个线程被堵塞时,会关联一个 Interruptible 对象。
对于 Selector 来说,在开始时,会关联这么一个 Interruptible 对象 :
protected final void begin() {
if (interruptor == null) {
interruptor = new Interruptible() {
public void interrupt(Thread target) {
synchronized (closeLock) {
if (closed)
return;
closed = true;
interrupted = target;
try {
AbstractInterruptibleChannel.this.implCloseChannel();
} catch (IOException x) { }
}
}};
}
blockedOn(interruptor);
Thread me = Thread.currentThread();
if (me.isInterrupted())
interruptor.interrupt(me);
}
当调用 interrupt 方式时,会关闭该 channel,这样就会关闭掉这个堵塞线程,可见为了实现这个功能,代价也是比较大的。LockSupport.park 中采用了类似技巧。
总结
也许基于多线程的并发编程不是最好的(可能是最复杂的,Clojure 大法好 :-),但却是最悠久的。
即便我们自己不去写往往也需要阅读别人的多线程代码,而且能够写出“正确”(who knows?)的多线程程序往往也是区分 senior 与 junior 程序员的标志,希望这篇文章能帮助大家理解 Java 是如何实现线程控制,有疑问欢迎留言指出,谢谢!
参考
- https://carlmastrangelo.com/blog/javas-mysterious-interrupt
- Java的LockSupport.park()实现分析
- 课件 COMP3151/9151 Foundations of Concurrency Lecture 6 - Semaphores, Monitors, POSIX Threads, Java
- 课件 http://crystal.uta.edu/~ylei/cse6324/data/semaphore.pdf
- 课件 https://cs61.seas.harvard.edu/wiki/images/1/12/Lec19-Semaphores.pdf
- Mutexes and Semaphores Demystified
- https://book.douban.com/subject/1888733/
- https://en.wikipedia.org/wiki/Mutual_exclusion
- https://stackoverflow.com/questions/3513045/conditional-variable-vs-semaphore
- https://stackoverflow.com/questions/2332765/lock-mutex-semaphore-whats-the-difference
正文到此结束
- 本文标签: 模型 CTO CyclicBarrier java 并发编程 tar ACE NSA executor ConcurrentHashMap value node consumer cat queue id 时间 并发 操作系统 http IDE ORM HashMap Select 源码 总结 进程 producer 代码 希望 CountDownLatch 美团 https src 数据 Action 线程同步 程序员 测试 final 线程 Job 多线程 IO synchronized 软件 struct lib UI Atom bus operating system Semaphore 服务器 锁 swap 文章 API NIO JVM list ip 同步 map 人物
- 版权声明: 本文为互联网转载文章,出处已在文章中说明(部分除外)。如果侵权,请联系本站长删除,谢谢。
- 本文海报: 生成海报一 生成海报二
热门推荐









相关文章

近期评论
-
谢谢
-
https://www.newcmy.com/register?aff=HBVX建议您试试草莓云机场,可以流畅观看youtube和tiktok,上reddit/x也没有问题,还有各种ai优化节点。
-
-
-
想购买您这个站,我的联系方式QQ741756694微信同步 能卖联系
-
-
-
-
-
https://www.liuhaihua.cn/archives/40657.html 这篇博客中的图片打不开了
Loading...
![[HBLOG]公众号](https://www.liuhaihua.cn/img/qrcode_gzh.jpg)

