Java集合系列之五:ConcurrentHashMap底层原理
ConcurrentHashMap底层原理
ConcurrentHashMap 可能会用的相对比较少,因为它跟 HashMap 其实功能非常相似,但是它是并发安全的,而且1.7和1.8版本中的变化比较大。
1.7版本
-
底层结构
1.7版本的底层数据结构比较特殊,像是类似于嵌套
Map一样,首先整个结构是有一个Segment数组,Segment是一个键值对形式的结构,然后内部存储的是HashEntry数组,这里面才真正的存放数值,而每次加锁的时候会锁住不同操作的那个Segment,也就是说如果操作的不是同一个,那肯定就不会进行加锁操作,默认会有16个Segment。static final class Segment<K,V> extends ReentrantLock implements Serializable { Segment(float lf, int threshold, HashEntry<K,V>[] tab) { this.loadFactor = lf; this.threshold = threshold; this.table = tab; } ... } static final class HashEntry<K,V> { final int hash; final K key; volatile V value; volatile HashEntry<K,V> next; ... }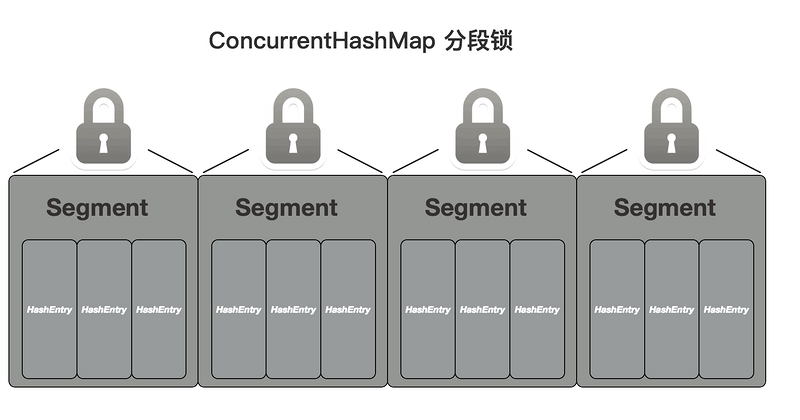
-
构造方法
总共有好几个构造方法,但是最终都是调用这个构造方法,可以看到就是根据设置的值来创建
Segment数组和Segment以及HashEntry数组。// 最大分段数量 static final int MAX_SEGMENTS = 1 << 16; // 最大容量 static final int MAXIMUM_CAPACITY = 1 << 30; // 默认分段数量 static final int DEFAULT_CONCURRENCY_LEVEL = 16; @SuppressWarnings("unchecked") public ConcurrentHashMap(int initialCapacity, float loadFactor, int concurrencyLevel) { if (!(loadFactor > 0) || initialCapacity < 0 || concurrencyLevel <= 0) throw new IllegalArgumentException(); // 限制最大分段数量 if (concurrencyLevel > MAX_SEGMENTS) concurrencyLevel = MAX_SEGMENTS; // Find power-of-two sizes best matching arguments int sshift = 0; // ssize是计算出Segment的容量 int ssize = 1; while (ssize < concurrencyLevel) { ++sshift; ssize <<= 1; } // 这两个变量在定位segment时会用到 this.segmentShift = 32 - sshift; this.segmentMask = ssize - 1; // 计算segment中每个HashEntry数组的容量 if (initialCapacity > MAXIMUM_CAPACITY) initialCapacity = MAXIMUM_CAPACITY; int c = initialCapacity / ssize; if (c * ssize < initialCapacity) ++c; int cap = MIN_SEGMENT_TABLE_CAPACITY; while (cap < c) cap <<= 1; // create segments and segments[0] //创建segments数组并初始化第一个Segment,其余的Segment延迟初始化 Segment<K,V> s0 = new Segment<K,V>(loadFactor, (int)(cap * loadFactor), (HashEntry<K,V>[])new HashEntry[cap]); Segment<K,V>[] ss = (Segment<K,V>[])new Segment[ssize]; UNSAFE.putOrderedObject(ss, SBASE, s0); // ordered write of segments[0] this.segments = ss; } -
put()方法
其实步骤就是先根据初始化定义的两个变量来计算要放到哪个
Segment,然后加锁,再定位到Segment里面的HashEntry数组key的插入位置,最后再判断是直接插入还是链表追加,加锁的方式是自旋尝试加锁。@SuppressWarnings("unchecked") public V put(K key, V value) { Segment<K,V> s; if (value == null) throw new NullPointerException(); int hash = hash(key); // 使用这两个初始化定义的全局变量定位segment,返回的hash值无符号右移segmentShift位与段掩码进行位运算 int j = (hash >>> segmentShift) & segmentMask; if ((s = (Segment<K,V>)UNSAFE.getObject // nonvolatile; recheck (segments, (j << SSHIFT) + SBASE)) == null) // in ensureSegment s = ensureSegment(j); // 调用对应的Segment的put()方法 return s.put(key, hash, value, false); } final V put(K key, int hash, V value, boolean onlyIfAbsent) { // 因为Segment继承ReentrantLock,使用tryLock()尝试获取独占锁 HashEntry<K,V> node = tryLock() ? null : scanAndLockForPut(key, hash, value); // 返回被替换的旧值 V oldValue; // 放入数据 try { // Segment中的HashEntry数组 HashEntry<K,V>[] tab = table; int index = (tab.length - 1) & hash; // 找到数组中对应key的第一个元素 HashEntry<K,V> first = entryAt(tab, index); for (HashEntry<K,V> e = first;;) { // 第一个元素不为空,直接在后面插入,形成链表 if (e != null) { K k; if ((k = e.key) == key || (e.hash == hash && key.equals(k))) { oldValue = e.value; if (!onlyIfAbsent) { e.value = value; ++modCount; } break; } e = e.next; } // scanAndLockForPut()操作中只有对应位置没有元素才创建node // 第一个元素为空,直接把这个node插入 else { if (node != null) node.setNext(first); else node = new HashEntry<K,V>(hash, key, value, first); int c = count + 1; if (c > threshold && tab.length < MAXIMUM_CAPACITY) rehash(node); else setEntryAt(tab, index, node); ++modCount; count = c; oldValue = null; break; } } } finally { // 解锁 unlock(); } return oldValue; } private HashEntry<K,V> scanAndLockForPut(K key, int hash, V value) { // 获取HashEntry数组上对应key的第一个元素 HashEntry<K,V> first = entryForHash(this, hash); HashEntry<K,V> e = first; HashEntry<K,V> node = null; int retries = -1; // negative while locating node // 自旋获取锁 while (!tryLock()) { HashEntry<K,V> f; // to recheck first below if (retries < 0) { // 为空就创建一个新节点 if (e == null) { if (node == null) // speculatively create node node = new HashEntry<K,V>(hash, key, value, null); retries = 0; } else if (key.equals(e.key)) retries = 0; else e = e.next; } // 超过自旋次数,直接锁住 else if (++retries > MAX_SCAN_RETRIES) { lock(); break; } // 头节点发生变化,重新遍历 else if ((retries & 1) == 0 && (f = entryForHash(this, hash)) != first) { e = first = f; // re-traverse if entry changed retries = -1; } } return node; } -
get()方法
get()方法中并没有用锁,而是使用了UNSAFE.getObjectVolatile()来获取,这是一个操作硬件级别的并发类,而这个方法是保证了Volatile语义,也就是取的时候一定会取到最新的值,所以不需要加锁。public V get(Object key) { Segment<K,V> s; // manually integrate access methods to reduce overhead HashEntry<K,V>[] tab; int h = hash(key); // 计算segment位置 long u = (((h >>> segmentShift) & segmentMask) << SSHIFT) + SBASE; // 计算HashEntry数组位置中的key位置 if ((s = (Segment<K,V>)UNSAFE.getObjectVolatile(segments, u)) != null && (tab = s.table) != null) { // 循环链表 for (HashEntry<K,V> e = (HashEntry<K,V>) UNSAFE.getObjectVolatile (tab, ((long)(((tab.length - 1) & h)) << TSHIFT) + TBASE); e != null; e = e.next) { K k; if ((k = e.key) == key || (e.hash == h && key.equals(k))) return e.value; } } return null; }
1.8版本
-
底层结构
在1.8版本的时候数据结构又改回和
HashMap类似的数组加链表,链表过长转化为红黑树,也不再使用ReentrantLock来保证并发,而是使用synchronized关键字和CAS操作保证并发问题,因为1.6开始synchronized锁做了优化,比如偏向锁、轻量锁和重量锁的升级,所以性能并不一定就差,但是还是保留了Segment来进行兼容。而且可以看到相较于
HashMap它的内部节点类里的属性使用volatile来声明。static class Node<K,V> implements Map.Entry<K,V> { final int hash; final K key; volatile V val; volatile Node<K,V> next; }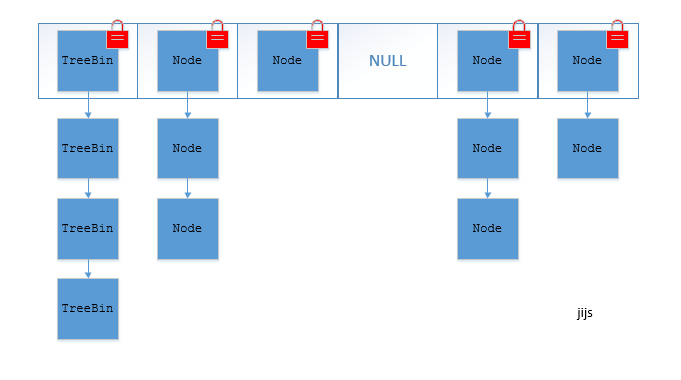
-
构造方法
可以看到除了为了兼容1.7版本而保留的构造方法之外,其他的构造方法都和
HashMap差不多。public ConcurrentHashMap(int initialCapacity) { if (initialCapacity < 0) throw new IllegalArgumentException(); int cap = ((initialCapacity >= (MAXIMUM_CAPACITY >>> 1)) ? MAXIMUM_CAPACITY : tableSizeFor(initialCapacity + (initialCapacity >>> 1) + 1)); this.sizeCtl = cap; } public ConcurrentHashMap(int initialCapacity, float loadFactor) { this(initialCapacity, loadFactor, 1); } public ConcurrentHashMap(int initialCapacity, float loadFactor, int concurrencyLevel) { if (!(loadFactor > 0.0f) || initialCapacity < 0 || concurrencyLevel <= 0) throw new IllegalArgumentException(); if (initialCapacity < concurrencyLevel) // Use at least as many bins initialCapacity = concurrencyLevel; // as estimated threads long size = (long)(1.0 + (long)initialCapacity / loadFactor); int cap = (size >= (long)MAXIMUM_CAPACITY) ? MAXIMUM_CAPACITY : tableSizeFor((int)size); this.sizeCtl = cap; } -
put()方法
首先是一个循环尝试插入,如果插入的位置上是空的,直接
CAS操作插入,如果有值则加synchronized锁,然后修改值,注意的是只锁住了单个索引上的链表或红黑树,也就是说除非是插入操作遇到了哈希碰撞才有加锁操作,否则是不会有加锁操作的,因为不同位置上的值的操作根本不可能有并发问题的,所以不需要加锁。public V put(K key, V value) { return putVal(key, value, false); } final V putVal(K key, V value, boolean onlyIfAbsent) { // key和value不能为空 if (key == null || value == null) throw new NullPointerException(); int hash = spread(key.hashCode()); int binCount = 0; // 循环知道成功为止 for (Node<K,V>[] tab = table;;) { Node<K,V> f; int n, i, fh; // 数组为空,初始化 if (tab == null || (n = tab.length) == 0) tab = initTable(); // 当前位置还没有元素,使用Unsafe类的CAS操作放入数据,成功了就跳出循环 else if ((f = tabAt(tab, i = (n - 1) & hash)) == null) { if (casTabAt(tab, i, null, new Node<K,V>(hash, key, value, null))) break; // no lock when adding to empty bin } // 扩容 else if ((fh = f.hash) == MOVED) tab = helpTransfer(tab, f); // 这里会加锁,但是注意锁住了链表或者红黑树,也就是说只单独锁住了数组中这个索引,对于其他的索引位置上的put和get都没有影响 else { V oldVal = null; // 锁住时候就是查找位置,判断数据结构进行插入 synchronized (f) { if (tabAt(tab, i) == f) { if (fh >= 0) { binCount = 1; for (Node<K,V> e = f;; ++binCount) { K ek; if (e.hash == hash && ((ek = e.key) == key || (ek != null && key.equals(ek)))) { oldVal = e.val; if (!onlyIfAbsent) e.val = value; break; } Node<K,V> pred = e; if ((e = e.next) == null) { pred.next = new Node<K,V>(hash, key, value, null); break; } } } else if (f instanceof TreeBin) { Node<K,V> p; binCount = 2; if ((p = ((TreeBin<K,V>)f).putTreeVal(hash, key, value)) != null) { oldVal = p.val; if (!onlyIfAbsent) p.val = value; } } } } if (binCount != 0) { if (binCount >= TREEIFY_THRESHOLD) treeifyBin(tab, i); if (oldVal != null) return oldVal; break; } } } addCount(1L, binCount); return null; } -
get()方法
整个方法就是直接进行哈希计算查找对应位置上的数据,因为前面说了
Node节点里的字段都是用volatile修饰,所以取的时候一定会取到最新的值。public V get(Object key) { Node<K,V>[] tab; Node<K,V> e, p; int n, eh; K ek; int h = spread(key.hashCode()); if ((tab = table) != null && (n = tab.length) > 0 && (e = tabAt(tab, (n - 1) & h)) != null) { if ((eh = e.hash) == h) { if ((ek = e.key) == key || (ek != null && key.equals(ek))) return e.val; } else if (eh < 0) return (p = e.find(h, key)) != null ? p.val : null; while ((e = e.next) != null) { if (e.hash == h && ((ek = e.key) == key || (ek != null && key.equals(ek)))) return e.val; } } return null; }
总结
-
ConcurrentHashMap对比与HashMap可以解决并发问题,其他的大体原理还是没有太多变化。 - 1.7版本使用的分段锁,1.8版本则更像是基于
HashMap使用synchronized和CAS操作来保证并发问题,而且只锁单个索引位置,性能更好。 -
ConcurrentHashMap是弱一致性的,也就是有些迭代器的方法可能没办法获取最新值,这也是为了性能而舍弃强一致性,不然只能像Hashtable那样直接锁住全部操作了。
正文到此结束
热门推荐









相关文章






Loading...
![[HBLOG]公众号](https://www.liuhaihua.cn/img/qrcode_gzh.jpg)

