“kill -9”一时爽,秋后算账泪两行
原创:小姐姐味道(微信公众号ID:xjjdog),欢迎分享,转载请保留出处。任何不保留此声明的转载都是抄袭。
kill 是杀死的意思,带有主动的意味。鉴于 master 、 slave 这样的名词,需要在计算机软件中进行整改,kill这样明显带有负面信息的单词,按理说也需要被干掉。
不过,如果把命令名字改了,效果也许会更好。因为在Linux上, kill 根本就不是杀死的意思。
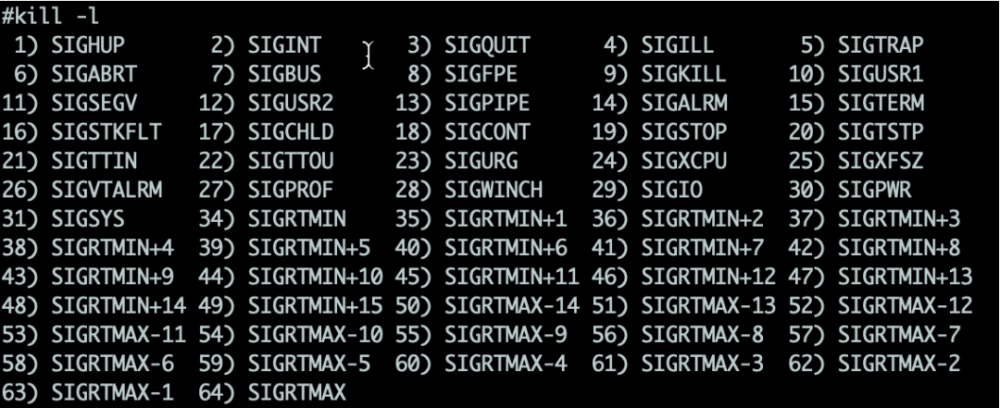
它只是想要给进程发送一个信号而已。使用 kill -l 可以看到长长的信号列表。
对Java程序员来说,用的最多的就是 kill -9 ,我也不知道从哪里来的传承,码农们都喜欢这种暴力性的命令--喜欢用锋利的匕首一击致命。
但是这种玩法又危险的多,不给进程说话的机会。
大家都知道电视剧里,重要人物临死的时候,会啰啰嗦嗦说很多话,话说不完是不会死的。无论是武林高手,还是达官贵人,都得交代一些能让故事情节继续发展下去的废话。
《水浒传》里的“英雄们”,来的就相对直接一些。看的不爽,直接单刀直入切中要害,不允许他人有一丁点的废话,通常情况下直接嗝屁。
各位使用 kill -9 的兄弟们,个个都像黑黑的李逵,单纯、暴力、不讲人情。
SIGKILL 9 Kill signal 结束信号
中国的中庸太极之道,在此荡然无存。 kill -9 直接使得 优雅关闭 这个名词成了废物。
何为优雅关闭?其实就像是人的“遗言”,要在死之前,交代一些身后事。
我就常常在想,在我死之前,要把所有的钱花的一分不剩。既不留给后代,也不让它烂在银行里。这就需要做很多事。
计算机软件中,在死之前,要处理的事情也还不少。比如,需要把缓冲区的内容处理完毕,发送出去;微服务节点需要先把自己从注册中心摘除,才能放心的 go die 。
大体来说,有下面几个影响:
-
请求丢失:内存队列中等待执行请求丢失
-
数据丢失:处于内存缓存中数据未持久化到磁盘
-
文件损坏:正在写的文件没有没有更新完成,导致文件损坏
-
业务中断:处理一半的业务被强行中断,如支付成功了,却没有更新到数据库中
-
服务未下线:上游服务依然往停止节点发送请求
这些情况下,如果把服务玩坏了,正好被领导撞上,被开是分分钟的事。
Java应用中处处充斥着这种 优雅 ,靠的是 shutdownhook 钩子。就是下面这行代码:
Runtime
.getRuntime()
.addShutdownHook(
new Thread(() -> System.out.println("Do something in Shutdown Hook")));
有没有好的办法?有,用 kill -15 发送 SIGTERM 信号即可。
但有时候 kill -15 并不能杀死进程,这个时候,才是 kill -9 需要出场的时候。
听够了15临死前说的一些废话,使用9要它的命。
一般的,需要使用 kill -15 去尝试杀死进程。如果过一段时间(比如10秒),进程还没有停止, kill -9 才会出场。
kill的默认信号值,就是 15 ,可以说是很贴心了。但还是有很多人使用 9 。
我想了半天原因,就是一个字: 懒 。
kill -15 需要多次确认,而 kill -9 一次完事,多数情况下不会出事。有这提高工作效率的事,何乐而不为呢?
常用的信号,还有SIGQUIT,也就是 kill -3 。
在Java程序下, kill -3 的输出特别有意思,它直接在stdout上输出了 jstack 命令所产生的内容。如果是tomcat,那么输出就在 canalina.out 文件里。
如果 jstack 对你的应用不好使了,或者应用几乎没有响应了。使用 kill -3 是一种曲线救国的方式。
其实是JDK屏蔽了这个信号,对Java来说是一个福利。我们在JDK的文档中找到相关介绍。
Sun’s JVM catches signals to implement shutdown hooks for abnormal JVM termination. The JVM uses SIGHUP, SIGINT, and SIGTERM to initiate the running of shutdown hooks.
The JVM uses a similar mechanism to implement the pre-1.2 feature of dumping thread stacks for debugging purposes. Sun’s JVM uses SIGQUIT to perform thread dumps.
我这里有一个脚本,能够接受两个参数。第一个参数是 pid ,第二个参数是等待的秒数。
pid=$1
count=$2
n=0
if [ ! -n $count ];then
count=10
fi
while [[ $n -lt $count ]]
do
let "n++"
kill -0 $pid
if [ $? -ne 0 ]
then
echo "program not exist"
break
else
echo "send kill -15 to $pid"
kill -15 $pid
sleep 1
fi
if [[ $n -eq $count ]]
then
echo "kill -9 $pid"
# after 10s , try to send kill -9
kill -9 $pid
fi
done
脚本将持续使用 kill -0 判断进程是否存在,然后持续发送 kill -15 指令。等超过指定的秒数,进程依然存在,则最终发送 kill -9 命令。
问题是,通常情况下,你还是需要等待上几秒。自动化机器人不会觉得烦,你会。
所以你还是用 kill -9 。
作者简介: 小姐姐味道 (xjjdog),一个不允许程序员走弯路的公众号。聚焦基础架构和Linux。十年架构,日百亿流量,与你探讨高并发世界,给你不一样的味道。我的个人微信xjjdog0,欢迎添加好友,进一步交流。
后台回复“ 加群 ”,带你进入高手如云交流群
推荐阅读:
正文到此结束
热门推荐










相关文章






Loading...
![[HBLOG]公众号](https://www.liuhaihua.cn/img/qrcode_gzh.jpg)

